Обґрунтування метода визначення динамічних параметрів оператора мобільної пожежної установки
DOI:
https://doi.org/10.15587/1729-4061.2023.272318Ключові слова:
оператор пожежної установки, динамічні параметри, тест-вплив, сигнал реакції оператораАнотація
Об’єктом дослідження є процес функціонування системи «людина-робот». Досліджується проблема узгодження параметрів людини-оператора і робота. Узгодження цих параметрів базується на методі визначення динамічних параметрів людини-оператора із використанням математичних моделей, які описують два види відносних похибок. До першого виду відносяться відносні похибки визначення динамічних параметрів оператора, які залежать від похибки визначення сигналів, що характеризують його реакцію на тест-вплив. До другого виду відносних похибок відноситься методична похибка, яка обумовлена апроксимацією частинних похідних.
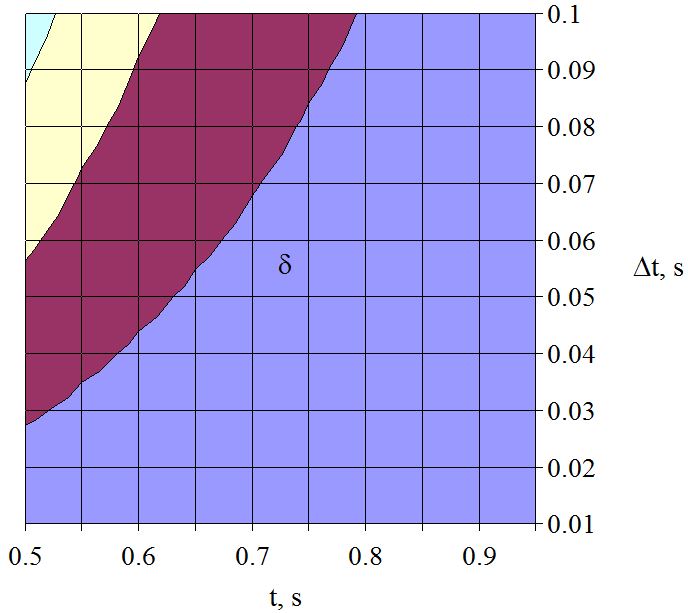
Формування тест-впливу на оператора здійснюється за допомогою інтерактивної дошки. В основі метода лежить знаходження коренів лінійної системи алгебраїчних рівнянь, для побудови якої використана апроксимація частинних похідних від сигналів, що характеризують реакцію оператора на тест-вплив. Параметри цієї системи алгебраїчних рівнянь залежать від часових параметрів. Визначення часових параметрів здійснюється за допомогою допускових критеріїв та із використанням номограм. При обґрунтуванні основного параметра тест-впливу на оператора – швидкості переміщення фронту пожежі на екрані інтерактивної дошки використовуються властивості системи кутового управління очима оператора мобільної пожежної установки. Ці властивості формалізовані у вигляді математичної моделі динамічної похибки, яка має місце в процесі відстеження оператором зображення пожежі на екрані інтерактивної дошки. Для верифікації одержаних результатів вирішена тест-задача і показано, що похибка визначення динамічних параметрів оператора не перевищує 1,0 %.
Отримані результати можуть бути використані при розробці мобільних пожежних установок нового покоління, в основі побудови яких лежить використання сігвеїв
Посилання
- Paris Firefighters Used This Remote-Controlled Robot to Extinguish the Notre Dame Blaze. Available at: https://spectrum.ieee.org/colossus-the-firefighting-robot-that-helped-save-notre-dame#toggle-gdpr
- Firefighter Drones – How Drones are Being Used for Helping Fire Departments. Available at: https://dronenodes.com/firefighter-drones/
- Segway-like robots designed to help firefighters and save lives. Available at: https://newatlas.com/firefighting-robot-ffr/27849/
- Matheson, E., Minto, R., Zampieri, E. G. G., Faccio, M., Rosati, G. (2019). Human–Robot Collaboration in Manufacturing Applications: A Review. Robotics, 8 (4), 100. doi: https://doi.org/10.3390/robotics8040100
- Roveda, L., Maskani, J., Franceschi, P., Abdi, A., Braghin, F., Molinari Tosatti, L., Pedrocchi, N. (2020). Model-Based Reinforcement Learning Variable Impedance Control for Human-Robot Collaboration. Journal of Intelligent & Robotic Systems, 100 (2), 417–433. doi: https://doi.org/10.1007/s10846-020-01183-3
- Semeraro, F., Griffiths, A., Cangelosi, A. (2023). Human–robot collaboration and machine learning: A systematic review of recent research. Robotics and Computer-Integrated Manufacturing, 79, 102432. doi: https://doi.org/10.1016/j.rcim.2022.102432
- Murali, P. K., Darvish, K., Mastrogiovanni, F. (2020). Deployment and evaluation of a flexible human–robot collaboration model based on AND/OR graphs in a manufacturing environment. Intelligent Service Robotics, 13 (4), 439–457. doi: https://doi.org/10.1007/s11370-020-00332-9
- Kaber, D. B. (2017). Issues in Human–Automation Interaction Modeling: Presumptive Aspects of Frameworks of Types and Levels of Automation. Journal of Cognitive Engineering and Decision Making, 12 (1), 7–24. doi: https://doi.org/10.1177/1555343417737203
- Müller, R., Oehm, L. (2018). Process industries versus discrete processing: how system characteristics affect operator tasks. Cognition, Technology & Work, 21 (2), 337–356. doi: https://doi.org/10.1007/s10111-018-0511-1
- Sharifi, M., Zakerimanesh, A., Mehr, J. K., Torabi, A., Mushahwar, V. K., Tavakoli, M. (2022). Impedance Variation and Learning Strategies in Human–Robot Interaction. IEEE Transactions on Cybernetics, 52 (7), 6462–6475. doi: https://doi.org/10.1109/tcyb.2020.3043798
- He, W., Xue, C., Yu, X., Li, Z., Yang, C. (2020). Admittance-Based Controller Design for Physical Human–Robot Interaction in the Constrained Task Space. IEEE Transactions on Automation Science and Engineering, 17 (4), 1937–1949. doi: https://doi.org/10.1109/tase.2020.2983225
- Tölgyessy, M., Dekan, M., Hubinský, P. (2018). Human-Robot Interaction Using Pointing Gestures. Proceedings of the 2nd International Symposium on Computer Science and Intelligent Control. doi: https://doi.org/10.1145/3284557.3284718
- Casalino, A., Messeri, C., Pozzi, M., Zanchettin, A. M., Rocco, P., Prattichizzo, D. (2018). Operator Awareness in Human–Robot Collaboration Through Wearable Vibrotactile Feedback. IEEE Robotics and Automation Letters, 3 (4), 4289–4296. doi: https://doi.org/10.1109/lra.2018.2865034
- Buldakova, T. I., Suyatinov, S. I. (2019). Hierarchy of Human Operator Models for Digital Twin. 2019 International Russian Automation Conference (RusAutoCon). doi: https://doi.org/10.1109/rusautocon.2019.8867602
- Surya Atman, M. W., Noda, K., Funada, R., Yamauchi, J., Hatanaka, T., Fujita, M. (2019). On Passivity-Shortage of Human Operators for A Class of Semi-autonomous Robotic Swarms. IFAC-PapersOnLine, 51 (34), 21–27. doi: https://doi.org/10.1016/j.ifacol.2019.01.008
- Khudyakova, E. P., Sedelkova, V. A., Tarasenkov, G. G., Chertopolokhov, V. A., Belousova, M. D., Natura, E. S. (2021). Characteristics of operator performance in controlling a virtual lunar rover during simulated lunar gravity. AIP Conference Proceedings. doi: https://doi.org/10.1063/5.0035989
- Grootheest, H. A. (2017). Human-Operator Identification with Time-Varying ARX Models. Available at: https://repository.tudelft.nl/islandora/object/uuid:da69d1cf-3274-466f-bbc2-573f571d154e?collection=education
- Sobina, V., Hizhnyak, A., Abramov, Yu. (2019). Determination of parameters of the model of the operator of a mobile fire installation. Problemy pozharnoy bezopasnosti, 45, 161–166. Available at: https://nuczu.edu.ua/sciencearchive/ProblemsOfFireSafety/vol45/Sobina.pdf
- Abramov, Yu. O., Sobyna, V. O., Tyshchenko, Ye. O., Khyzhniak, A. A., Khmyrov, I. M. (2018). Pat. No. 128951 UA. Prystriy dlia vyznachennia kharakterystyk operatora mobilnoho pozhezhnoho robota. No. u201805111; declareted: 08.05.2018; published: 10.10.2018, Bul. No. 19. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=251706
- Abramov, Y., Basmanov, O., Krivtsova, V., Sobyna, V., Sokolov, D. (2021). Developing a method for determining the dynamic parameters of the operator of a mobile fire engine based on a Segway. Eastern-European Journal of Enterprise Technologies, 3 (3 (111)), 58–63. doi: https://doi.org/10.15587/1729-4061.2021.233365
- Abramov, Yu. O., Sobyna, V. O., Tyshchenko, Ye. O., Khyzhniak, A. A., Danilin, O. M. (2019). Pat. No. 135301 UA. Prystriy dlia vyznachennia kharakterystyk operatora mobilnoho pozhezhnoho robota. No. u201900596; declareted: 21.01.2019; published: 25.06.2019, Bul. No. 12. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=259683
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Yuriy Abramov, Oleksii Basmanov, Vitaliy Sobyna, Oleksandr Kovalov, Andrey Feshchenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






