Розробка виявлення об'єктів з хмар точок тривимірного набору даних за допомогою нейронної мережі Point-Pillars
DOI:
https://doi.org/10.15587/1729-4061.2023.275155Ключові слова:
виявлення об'єктів, хмари точок, point-pillars, згорткова нейронна мережа з глибоким навчаннямАнотація
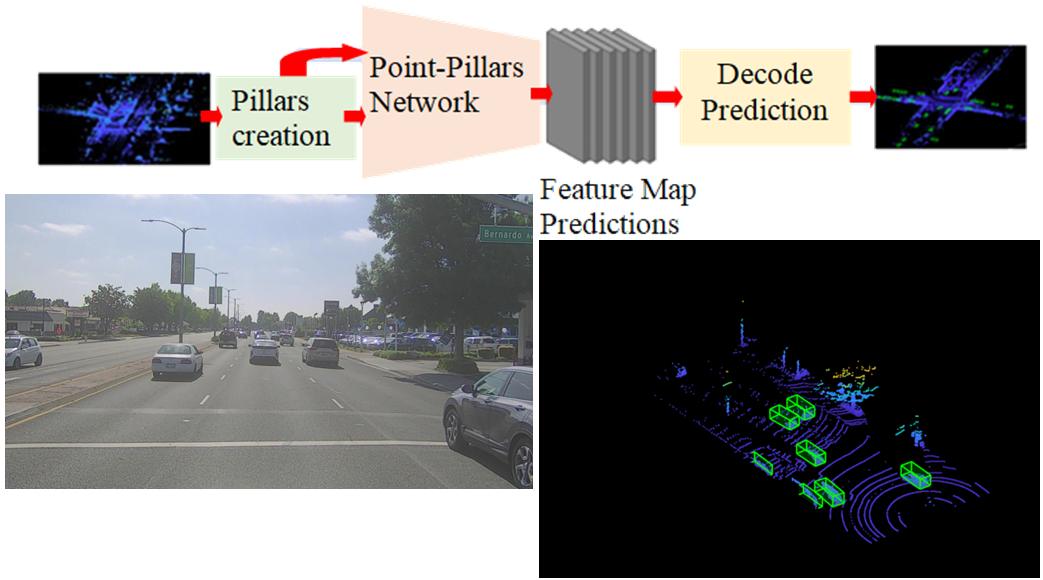
Алгоритми глибокого навчання дозволяють автоматично обробляти хмари точок у широкому діапазоні реалізацій тривимірної візуалізації. Вони застосовуються в сучасних системах допомоги водієві, в області сприйняття та навігації роботів, класифікації сцен, спостереження, стереобачення та оцінки глибини. Згідно з попередніми дослідженнями, виявлення об'єктів з хмар точок тривимірного набору даних з прийнятною точністю все ще є складним завданням. У роботі використовується метод Point-Pillars для виявлення тривимірного об'єкта з використанням шарів двовимірної згорткової нейронної мережі (CNN). Архітектура Point-Pillars включає навчальний кодувальник для використання Point-Nets для навчання демонстрації хмар точок, структурованих вертикальними стовпцями (pillars). Архітектура Point-Pillars використовує двовимірну CNN для декодування прогнозів, створення оцінок мережі та тривимірних оболонок для позначення різних об'єктів, таких як пішоходи, вантажівки та легкові автомобілі. Метою даного дослідження є виявлення об'єктів із хмар точок тривимірного набору даних за допомогою архітектури нейронної мережі Point-Pillars, що дозволяє виявляти тривимірний об'єкт за допомогою шарів двовимірної згорткової нейронної мережі (CNN). Даний метод включає в себе отримання розрідженого псевдозображення з хмари точок за допомогою кодувальника ознак, використання магістралі двовимірної згортки для обробки псевдозображення у високорівневе та використання детекторних головок для регресії і виявлення тривимірних обмежуючих рамок. У роботі використовується доповнення до даних підсупутникових спостережень, а також додаткові доповнення до глобальних методів збору даних для включення подальшої різноманітності в пакети даних навчання та ідентифікації. Отримані результати показали, що середня подібність орієнтації (AOS) та середня точність (AP) склали 0,60989, 0,61157 для вантажних автомобілів та 0,74377, 0,75569 для легкових автомобілів.
Спонсор дослідження
- The authors would like to express their deepest gratitude to the Northern Technical University, Mosul- Iraq for their support to complete this research.
Посилання
- Geiger, A., Lenz, P., Urtasun, R. (2012). Are we ready for autonomous driving? The KITTI vision benchmark suite. 2012 IEEE Conference on Computer Vision and Pattern Recognition. doi: https://doi.org/10.1109/cvpr.2012.6248074
- Fuseya, Y., Kariyado, T., Ogata, M. (2009). Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Andreas. Journal of the Physical Society of Japan.
- Song, X., Wang, P., Zhou, D., Zhu, R., Guan, C., Dai, Y. et al. (2019). ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). doi: https://doi.org/10.1109/cvpr.2019.00560
- Liu, H., Guo, Y., Ma, Y., Lei, Y., Wen, G. (2021). Semantic Context Encoding for Accurate 3D Point Cloud Segmentation. IEEE Transactions on Multimedia, 23, 2045–2055. doi: https://doi.org/10.1109/tmm.2020.3007331
- Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser, T., Niessner, M. (2017). ScanNet: Richly-Annotated 3D Reconstructions of Indoor Scenes. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). doi: https://doi.org/10.1109/cvpr.2017.261
- Rossi, D., Veglia, P., Sammarco, M., Larroca, F. (2012). ModelNet-TE: An emulation tool for the study of P2P and traffic engineering interaction dynamics. Peer-to-Peer Networking and Applications, 6 (2), 194–212. doi: https://doi.org/10.1007/s12083-012-0134-x
- Sabry, A. H., Nordin, F. H., Sabry, A. H., Abidin Ab Kadir, M. Z. (2020). Fault Detection and Diagnosis of Industrial Robot Based on Power Consumption Modeling. IEEE Transactions on Industrial Electronics, 67 (9), 7929–7940. doi: https://doi.org/10.1109/tie.2019.2931511
- Nazir, D., Afzal, M. Z., Pagani, A., Liwicki, M., Stricker, D. (2021). Contrastive Learning for 3D Point Clouds Classification and Shape Completion. Sensors, 21 (21), 7392. doi: https://doi.org/10.3390/s21217392
- Hamza, E., Aziez, S., Hummadi, F., Sabry, A. (2022). Classifying wireless signal modulation sorting using convolutional neural network. Eastern-European Journal of Enterprise Technologies, 6 (9 (120)), 70–79. doi: https://doi.org/10.15587/1729-4061.2022.266801
- Fernandes, D., Silva, A., Névoa, R., Simões, C., Gonzalez, D., Guevara, M. et al. (2021). Point-cloud based 3D object detection and classification methods for self-driving applications: A survey and taxonomy. Information Fusion, 68, 161–191. doi: https://doi.org/10.1016/j.inffus.2020.11.002
- Zhou, Z., Gong, J. (2018). Automated residential building detection from airborne LiDAR data with deep neural networks. Advanced Engineering Informatics, 36, 229–241. doi: https://doi.org/10.1016/j.aei.2018.04.002
- Qing, L., Yang, K., Tan, W., Li, J. (2020). Automated Detection of Manhole Covers in MLS Point Clouds Using a Deep Learning Approach. IGARSS 2020 - 2020 IEEE International Geoscience and Remote Sensing Symposium. doi: https://doi.org/10.1109/igarss39084.2020.9324137
- Lang, A. H., Vora, S., Caesar, H., Zhou, L., Yang, J., Beijbom, O. (2019). PointPillars: Fast Encoders for Object Detection From Point Clouds. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). doi: https://doi.org/10.1109/cvpr.2019.01298
- Tu, J., Wang, P., Liu, F. (2021). PP-RCNN: Point-Pillars Feature Set Abstraction for 3D Real-time Object Detection. 2021 International Joint Conference on Neural Networks (IJCNN). doi: https://doi.org/10.1109/ijcnn52387.2021.9534098
- Hu, T., Sun, X., Su, Y., Guan, H., Sun, Q., Kelly, M., Guo, Q. (2020). Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sensing, 13 (1), 77. doi: https://doi.org/10.3390/rs13010077
- Guan, L., Chen, Y., Wang, G., Lei, X. (2020). Real-Time Vehicle Detection Framework Based on the Fusion of LiDAR and Camera. Electronics, 9 (3), 451. doi: https://doi.org/10.3390/electronics9030451
- Shin, M.-O., Oh, G.-M., Kim, S.-W., Seo, S.-W. (2017). Real-Time and Accurate Segmentation of 3-D Point Clouds Based on Gaussian Process Regression. IEEE Transactions on Intelligent Transportation Systems, 18 (12), 3363–3377. doi: https://doi.org/10.1109/tits.2017.2685523
- Cai, H., Rasdorf, W. (2008). Modeling Road Centerlines and Predicting Lengths in 3-D Using LIDAR Point Cloud and Planimetric Road Centerline Data. Computer-Aided Civil and Infrastructure Engineering, 23 (3), 157–173. doi: https://doi.org/10.1111/j.1467-8667.2008.00518.x
- Marshall, M. R., Hellfeld, D., Joshi, T. H. Y., Salathe, M., Bandstra, M. S., Bilton, K. J. et al. (2021). 3-D Object Tracking in Panoramic Video and LiDAR for Radiological Source–Object Attribution and Improved Source Detection. IEEE Transactions on Nuclear Science, 68 (2), 189–202. doi: https://doi.org/10.1109/tns.2020.3047646
- Xiao, P., Shao, Z., Hao, S., Zhang, Z., Chai, X., Jiao, J. et al. (2021). PandaSet: Advanced Sensor Suite Dataset for Autonomous Driving. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). doi: https://doi.org/10.1109/itsc48978.2021.9565009
- Shi, W., Rajkumar, R. (2020). Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). doi: https://doi.org/10.1109/cvpr42600.2020.00178
- Song, S., Lichtenberg, S. P., Xiao, J. (2015). SUN RGB-D: A RGB-D scene understanding benchmark suite. 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). doi: https://doi.org/10.1109/cvpr.2015.7298655
- Geiger, A., Lenz, P., Stiller, C., Urtasun, R. (2013). Vision meets robotics: The KITTI dataset. The International Journal of Robotics Research, 32 (11), 1231–1237. doi: https://doi.org/10.1177/0278364913491297
- Qi, C. R., Litany, O., He, K., Guibas, L. (2019). Deep Hough Voting for 3D Object Detection in Point Clouds. 2019 IEEE/CVF International Conference on Computer Vision (ICCV). doi: https://doi.org/10.1109/iccv.2019.00937
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Omar I. Dallal Bashi, Husamuldeen K. Hameed, Yasir Mahmood Al Kubaiaisi, Ahmad H. Sabry

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






