Розробка LQR-регулятора для стабілізації нелінійної DIP-системи на основі алгоритму ABC
DOI:
https://doi.org/10.15587/1729-4061.2023.275657Ключові слова:
подвійний перевернутий маятник (DIP), нелінійні системи, нестійкі системи, лінійно-квадратичний регулятор (LQR), штучна бджолина колонія (ABC)Анотація
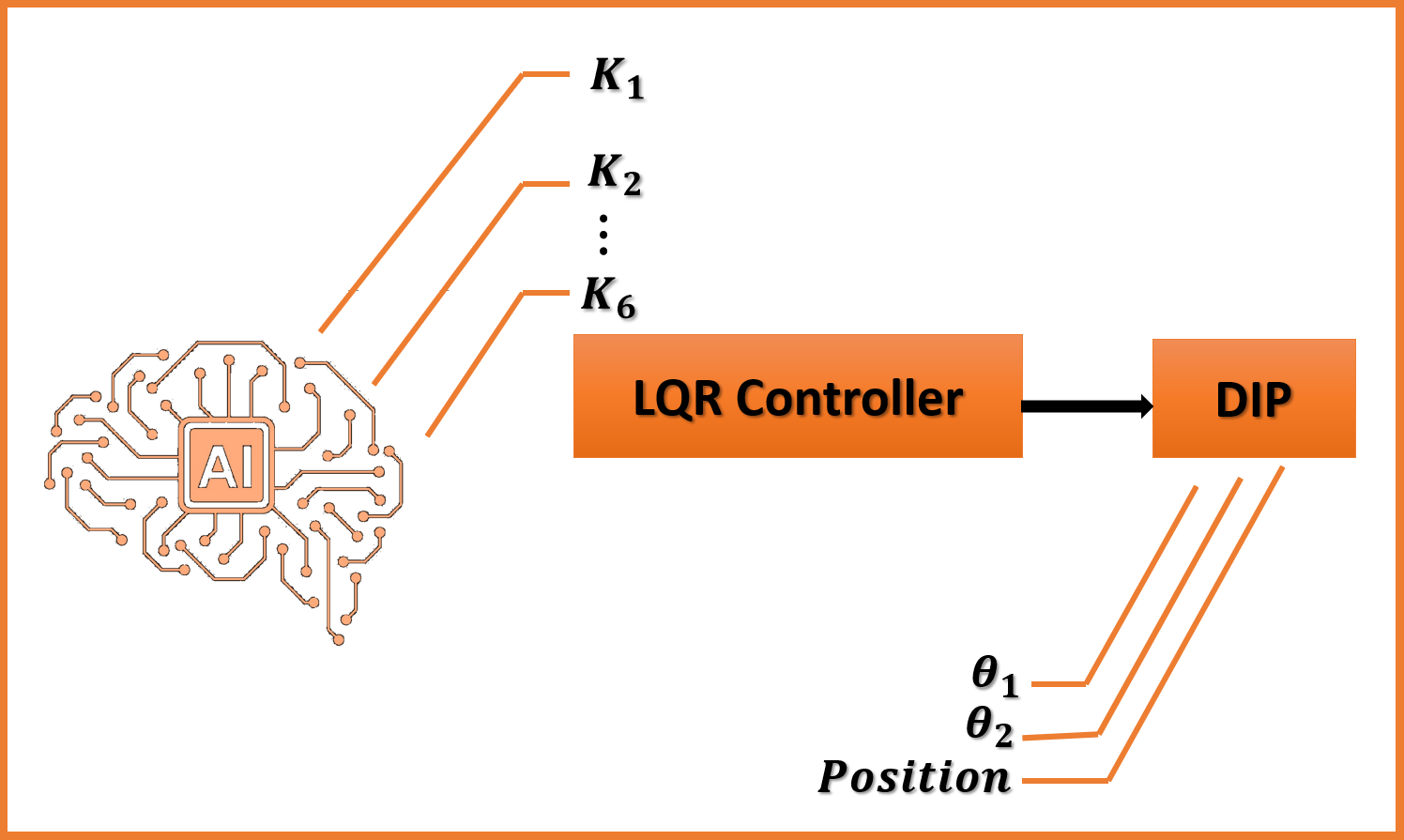
Системи з перевернутим маятником, такі як подвійні або одинарні, обертальні або поступальні перевернуті маятники є нелінійними і нестійкими, що є найбільш поширеним підходом до систем управління. Подвійний перевернутий маятник є одним із видів нелінійної, нестійкої системи, багатофакторним та сильним зв'язком з широким спектром методів управління. Для моделювання систем такого типу було запропоновано безліч методів, що мотивують дослідників на пошук нових інноваційних рішень. Поширеним контролером, що використовується в цій галузі, є лінійно-квадратичний регулятор (LQR). Тим часом альтернативним рішенням для використання алгоритмів інтелекту бджолиного рою став метод штучної бджолиної колонії (ABC). Описані в літературі дослідницькі рішення алгоритму штучної бджолиної колонії можуть бути корисними, проте використання виявлених джерел їжі неефективно. Таким чином, у цій роботі ми прагнемо створити систему з подвійним перевернутим маятником для стабілізації шляхом вибору параметрів лінійно-квадратичного регулятора з використанням біоінспірованої методології оптимізації штучної бджолиної колонії та вагових матриць Q та R. Результати показують, що при застосуванні алгоритму штучної бджолиної колонії до лінійно-квадратичного регулятора, він отримує можливість автономно налаштовуватися в режимі онлайн. Щоб додатково продемонструвати ефективність та життєздатність запропонованої методології, було проведено моделювання та порівняння зі звичайними лінійно-квадратичними регуляторами. Отримані результати показують, що використання штучного інтелекту (ШІ) спільно з запропонованим регулятором перевершує звичайні лінійно-квадратичні регулятори більш ніж на 50 % за перехідною характеристикою та поліпшеним часовим характеристикам і стійкості
Спонсор дослідження
- The researchers would like to extend their thanks and appreciation to Ninevah University/College of Electronics Engineering for their support, which has assisted to boost the outcomes of this research paper.
Посилання
- Łukowska, A., Tomaszuk, P., Dzierżek, K., Kamieński, K., Rólkowski, P., Ostaszewski, M. (2019). Optimal design of the double inverted pendulum. Engineering Mechanics. doi: https://doi.org/10.21495/71-0-235
- Susanto, E., Surya Wibowo, A., Ghiffary Rachman, E. (2020). Fuzzy Swing Up Control and Optimal State Feedback Stabilization for Self-Erecting Inverted Pendulum. IEEE Access, 8, 6496–6504. doi: https://doi.org/10.1109/access.2019.2963399
- Lukowska, A., Tomaszuk, P., Ciezkowski, M., Dzierzek, K., Recko, M. (2018). Acceleration control approach of double inverted pendulum system. 2018 19th International Carpathian Control Conference (ICCC). doi: https://doi.org/10.1109/carpathiancc.2018.8399614
- Tiunov, I. V., Vasilyev, N. O. (2021). The Modification of the ABC Synthesis Algorithm for FPGAs Considering Architecture Features. 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus). doi: https://doi.org/10.1109/elconrus51938.2021.9396324
- Le Dinh, L., Vo Ngoc, D., Vasant, P. (2013). Artificial Bee Colony Algorithm for Solving Optimal Power Flow Problem. The Scientific World Journal, 2013, 1–9. doi: https://doi.org/10.1155/2013/159040
- Xu, Y., Fan, P., Yuan, L. (2013). A Simple and Efficient Artificial Bee Colony Algorithm. Mathematical Problems in Engineering, 2013, 1–9. doi: https://doi.org/10.1155/2013/526315
- Banerjee, R., Dey, N., Mondal, U., Hazra, B. (2018). Stabilization of Double Link Inverted Pendulum Using LQR. 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT). doi: https://doi.org/10.1109/icctct.2018.8550915
- Sowjanya, R., Ramesh, G. (2015). Design of optimal controller for double inverted pendulum. International Journal of Emerging Engineering Science and Technology, 1 (5), 261.
- Sanjeewa, S. D. A., Parnichkun, M. (2021). Control of rotary double inverted pendulum system using LQR sliding surface based sliding mode controller. Journal of Control and Decision, 9 (1), 89–101. doi: https://doi.org/10.1080/23307706.2021.1914758
- Zheng, Y., Zhong, P., Yue, Q. (2016). Double Inverted Pendulum Based on LQG Optimal Control. Proceedings of the 2016 International Conference on Automatic Control and Information Engineering. doi: https://doi.org/10.2991/icacie-16.2016.20
- Sanjeewa, S. D., Parnichkun, M. (2019). Control of rotary double inverted pendulum system using mixed sensitivity H∞ controller. International Journal of Advanced Robotic Systems, 16 (2), 172988141983327. doi: https://doi.org/10.1177/1729881419833273
- Singh, N., Bhangal, K. (2017). Robust Control of Double Inverted Pendulum System. Journal of Automation and Control Engineering, 5 (1), 14–20. doi: https://doi.org/10.18178/joace.5.1.14-20
- Jibril, M. (2020). Robust Control Theory Based Performance Investigation of an Inverted Pendulum System using Simulink. Control Theory and Informatics. doi: https://doi.org/10.7176/cti/9-04
- Al-Janan, D. H., Chang, H.-C., Chen, Y.-P., Liu, T.-K. (2017). Optimizing the double inverted pendulum’s performance via the uniform neuro multiobjective genetic algorithm. International Journal of Automation and Computing, 14 (6), 686–695. doi: https://doi.org/10.1007/s11633-017-1069-8
- Wang, Z.-M., Sun, J.-J., Yue, H. (2005). Research on an inverted pendulum optimal control system based on LQR. Industrial Instrumentation and automation, 3, 6–8.
- Xiong, X., Wan, Z. (2010). The simulation of double inverted pendulum control based on particle swarm optimization LQR algorithm. 2010 IEEE International Conference on Software Engineering and Service Sciences. doi: https://doi.org/10.1109/icsess.2010.5552427
- Molnar, C. A., Balogh, T., Boussaada, I., Insperger, T. (2020). Calculation of the critical delay for the double inverted pendulum. Journal of Vibration and Control, 27 (3-4), 356–364. doi: https://doi.org/10.1177/1077546320926909
- Shi, H., Xu, Z., Sun, T., Wu, C. (2019). Double Inverted Pendulum System Control Based on Internal Model Principle. 2019 34rd Youth Academic Annual Conference of Chinese Association of Automation (YAC). doi: https://doi.org/10.1109/yac.2019.8787696
- Barya, K., Tiwari, S., Jha, R. (2010). Comparison of LQR and robust controllers for stabilizing inverted pendulum system. 2010 International Conference on Communication Control and Computing Technologies. doi: https://doi.org/10.1109/icccct.2010.5670570
- Habib, M. K., Ayankoso, S. A. (2020). Modeling and Control of a Double Inverted Pendulum using LQR with Parameter Optimization through GA and PSO. 2020 21st International Conference on Research and Education in Mechatronics (REM). doi: https://doi.org/10.1109/rem49740.2020.9313893
- Karaboga, D., Basturk, B. (2007). Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems. Foundations of Fuzzy Logic and Soft Computing, 789–798. doi: https://doi.org/10.1007/978-3-540-72950-1_77
- Bozogullarindan, E., Bozogullarindan, C., Ozturk, C. (2020). Transfer Learning in Artificial Bee Colony Programming. 2020 Innovations in Intelligent Systems and Applications Conference (ASYU). doi: https://doi.org/10.1109/asyu50717.2020.9259801
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Mohammad A. Thanoon, Sohaib R. Awad, Ismael Kh. Abdullah

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







