Розробка системи прогнозованого управління та контролю комбінованим пропульсивним комплексом
DOI:
https://doi.org/10.15587/1729-4061.2024.313627Ключові слова:
пропульсивний комплекс, прогнозоване управління, розподілена система, контролер високого рівняАнотація
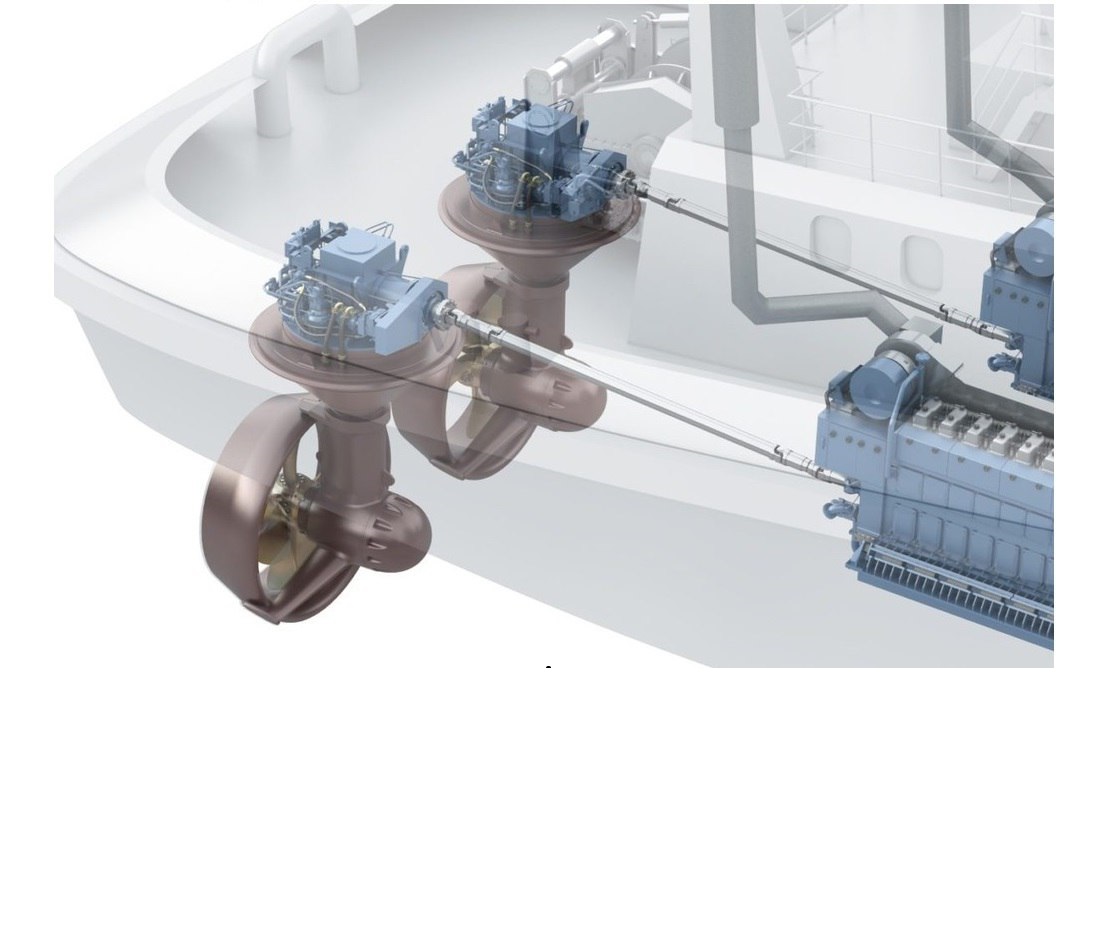
Об’єктом дослідження є процес маневрування транспортного засобу морського базування (ТЗМБ) в стиснутих умовах, що вимагає стовідсоткового резервування підрулюючих пристроїв (ПП) різних модифікацій та розташування. Основною проблемою залишається забезпечення енергоефективного управління рухом судна на низькій швидкості в горизонтальній площині із використанням контролера прогнозованого управління високого рівня. Ієрархія системи керування рухом (СКР) зазвичай розділена на кілька рівнів за допомогою високорівневого контролера руху та алгоритму розподілу управління двигунами ПП. Це дозволяє створити модульну конструкцію програмного забезпечення, де контролер високого рівня (КВР) можна спроектувати без використання вичерпної інформації про двигуни ПП. Однак для певного набору конфігурацій ПП таке від’єднання може призвести до зниження продуктивності керування через обмеженість даних КВР щодо фізичних обмежень судна та поведінку СКР.
Основними результатами дослідження є методи покращення продуктивності керування з використанням нелінійного прогнозованого керування моделлю (MPC) як основи для розроблених контролерів руху через його оптимізоване рішення та здатність враховувати обмеження. Була реалізована відокремлена система для двох простих рухових завдань, що показують проблеми, пов’язані з роз’єднанням. Усунення недоліків відбулося за рахунок розроблення нелінійного контролера MPC, який поєднує контролер руху та розподілу управління двигунами ПП. Для збереження відокремленої модульності системи керування та досягнення її адекватної продуктивності був розроблений нелінійний контролер MPC із змінними в часі обмеженнями. Це дозволило врахувати поточні обмеження системи управління ПП, збільшити точність управління та зменшити час відгуку системи на 10 %
Посилання
- Budashko, V. (2017). Formalization of design for physical model of the azimuth thruster with two degrees of freedom by computational fluid dynamics methods. Eastern-European Journal of Enterprise Technologies, 3 (7 (87)), 40–49. https://doi.org/10.15587/1729-4061.2017.101298
- Fossen, T. I. (2021). Handbook of Marine Craft Hydrodynamics and Motion Control. Wiley. https://doi.org/10.1002/9781119575016
- van Goor, P., Hamel, T., Mahony, R. (2023). Constructive Equivariant Observer Design for Inertial Navigation. IFAC-PapersOnLine, 56 (2), 2494–2499. https://doi.org/10.1016/j.ifacol.2023.10.1229
- Maidana, R. G., Kristensen, S. D., Utne, I. B., Sørensen, A. J. (2023). Risk-based path planning for preventing collisions and groundings of maritime autonomous surface ships. Ocean Engineering, 290, 116417. https://doi.org/10.1016/j.oceaneng.2023.116417
- Bekker, J. R., Dou, S. X. (2002). A Packaged System Approach to DP Vessel Conversion. Dynamic Positioning Conference. Available at: http://dynamic-positioning.com/proceedings/dp2002/workboats_packaged_system.pdf
- Cozijn, H., Hallmann, R., Koop, A. (2010). Analysis of the velocities in the wake of an azimuthing thruster, using PIV measurements and CFD calculations. Dynamic positioning conference: thrusters session. Available at: https://dynamic-positioning.com/proceedings/dp2010/thrusters_cozijn.pdf
- Furmanik, M., Konvičný, D., Rafajdus, P. (2023). Low-Speed Sensorless Control for Six-Phase PMSM Based on Magnetic Anisotropy. Transportation Research Procedia, 74, 892–899. https://doi.org/10.1016/j.trpro.2023.11.222
- Hemalatha, N., Venkatesan, S., Kannan, R., Kannan, S., Bhuvanesh, A., Kamaraja, A. S. (2024). Sensorless speed and position control of permanent magnet BLDC motor using particle swarm optimization and ANFIS. Measurement: Sensors, 31, 100960. https://doi.org/10.1016/j.measen.2023.100960
- Sun, L. (2022). Low speed sensorless control method of brushless DC motor based on pulse high frequency voltage injection. Alexandria Engineering Journal, 61(8), 6457–6463. https://doi.org/10.1016/j.aej.2021.12.005
- Budashko, V., Sandler, A., Khniunin, S. (2023). Improving the method of linear-quadratic control over a physical model of vessel with azimuthal thrusters. Eastern-European Journal of Enterprise Technologies, 1 (2 (121)), 49–71. https://doi.org/10.15587/1729-4061.2023.273934
- de A. Fernandes, D., Sorensen, A. J., Donha, D. C. (2013). Trajectory Tracking Motion Control System for Observation Class ROVs. IFAC Proceedings Volumes, 46 (33), 251–256. https://doi.org/10.3182/20130918-4-jp-3022.00025
- Houska, B., Ferreau, H. J., Diehl, M. (2011). ACADO toolkit – An open‐source framework for automatic control and dynamic optimization. Optimal Control Applications and Methods, 32 (3), 298–312. https://doi.org/10.1002/oca.939
- Johansen, T. A., Fossen, T. I. (2013). Control allocation – A survey. Automatica, 49 (5), 1087–1103. https://doi.org/10.1016/j.automatica.2013.01.035
- Yari, E., Ghassemi, H. (2016). Hydrodynamic analysis of the surface-piercing propeller in unsteady open water condition using boundary element method. International Journal of Naval Architecture and Ocean Engineering, 8 (1), 22–37. https://doi.org/10.1016/j.ijnaoe.2015.09.002
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Diagnosis of the Technical Condition of High-tech Complexes by Probabilistic Methods. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation, 16 (1), 105–111. https://doi.org/10.12716/1001.16.01.11
- Glad, T., Ljung, L. (2018). Control Theory. CRC Press. https://doi.org/10.1201/9781315274737
- Budashko, V. (2020). Thrusters Physical Model Formalization with regard to Situational and Identification Factors of Motion Modes. 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), 10, 1–6. https://doi.org/10.1109/icecce49384.2020.9179301
- Brezina, A., Thomas, S. (2013). Measurement of Static and Dynamic Performance Characteristics of Electric Propulsion Systems. 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. https://doi.org/10.2514/6.2013-500
- Bucknall, R. W. G., Ciaramella, K. M. (2010). On the Conceptual Design and Performance of a Matrix Converter for Marine Electric Propulsion. IEEE Transactions on Power Electronics, 25 (6), 1497–1508. https://doi.org/10.1109/tpel.2009.2037961
- Zhong, Y., Yu, C., Bai, Y., Zeng, Z., Lian, L. (2024). Diving dynamics identification and motion prediction for marine crafts using field data. Journal of Ocean Engineering and Science, 9 (4), 391–400. https://doi.org/10.1016/j.joes.2023.12.001
- Abdessameud, A., Polushin, I. G., Tayebi, A. (2015). Motion coordination of thrust-propelled underactuated vehicles with intermittent and delayed communications. Systems & Control Letters, 79, 15–22. https://doi.org/10.1016/j.sysconle.2015.02.006
- Babadi, M. K., Ghassemi, H. (2013). Effect of hull form coefficients on the vessel sea-keeping performance. Journal of Marine Science and Technology. – 2013. – 11 p. https://doi.org/10.6119/JMST-013-0117-2
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Optimization of the control system for an electric power system operating on a constant-power hyperbole. Eastern-European Journal of Enterprise Technologies, 1 (8 (115)), 6–17. https://doi.org/10.15587/1729-4061.2022.252172
- Carrera, A., Palomeras, N., Hurtós, N., Kormushev, P., Carreras, M. (2015). Cognitive system for autonomous underwater intervention. Pattern Recognition Letters, 67, 91–99. https://doi.org/10.1016/j.patrec.2015.06.010
- Budashko, V., Golikov, V. (2017). Theoretical-applied aspects of the composition of regression models for combined propulsion complexes based on data of experimental research. Eastern-European Journal of Enterprise Technologies, 4 (3 (88)), 11–20. https://doi.org/10.15587/1729-4061.2017.107244
- Myrhorod, V., Hvozdeva, I., Budashko, V. (2020). Multi-parameter Diagnostic Model of the Technical Conditions Changes of Ship Diesel Generator Sets. 2020 IEEE Problems of Automated Electrodrive. Theory and Practice (PAEP), 1895, 1–4. https://doi.org/10.1109/paep49887.2020.9240905
- Budashko, V., Shevchenko, V. (2021). The synthesis of control system to synchronize ship generator assemblies. Eastern-European Journal of Enterprise Technologies, 1 (2 (109)), 45–63. https://doi.org/10.15587/1729-4061.2021.225517
- Budashko, V., Shevchenko, V. (2021). Solving a task of coordinated control over a ship automated electric power system under a changing load. Eastern-European Journal of Enterprise Technologies, 2 (2 (110)), 54–70. https://doi.org/10.15587/1729-4061.2021.229033
- Sandler, A., Budashko, V. (2022). Improving tools for diagnosing technical condition of ship electric power installations. Eastern-European Journal of Enterprise Technologies, 5 (5 (119)), 25–33. https://doi.org/10.15587/1729-4061.2022.266267
- Sandler, A., Budashko, V., Khniunin, S., Bogach, V. (2023). Improving the mathematical model of a fiber-optic inclinometer for vibration diagnostics of elements in the propulsion system with sliding bearings. Eastern-European Journal of Enterprise Technologies, 5 (5 (125)), 24–31. https://doi.org/10.15587/1729-4061.2023.289773
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2024 Vitalii Budashko, Albert Sandler, Sergii Khniunin, Valentyn Bogach

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







