Підвищення ефективності використання транспортних колон за допомогою безпілотних автомобілів
DOI:
https://doi.org/10.15587/1729-4061.2025.327109Ключові слова:
транспортна колона, безпілотний автомобіль, маневреність колони, керованість колони, швидкість колони, пропускна здатністьАнотація
Об’єктом дослідження є процес руху автомобільної колони, яка створена за допомогою безпілотних автомобілів.
Дослідження спрямовано на розв’язання проблеми, яка полягає у необхідності підвищення керованості, маневреності, енергоефективності транспортних колон, а також пропускної здатності автомобільних доріг. Одним із шляхів вирішення є використання безпілотних автомобілів.
Предмет дослідження – оцінка можливості поліпшення показників маневреності, керованості, енергоефективності автомобільних колон та пропускної здатності автомобільних доріг за рахунок використання безпілотних автомобілів.
У ході дослідження визначено поняття керованості та маневреності безпілотних транспортних колон. Визначено взаємозв’язок між використанням безпілотних автомобілів і підвищенням маневреності та керованості транспортних колон. Використання безпілотних автомобілів дозволяє відмовитися від врахування при встановленні дистанції гальмівного шляху та зменшити шлях запасу з 5 м до нуля.
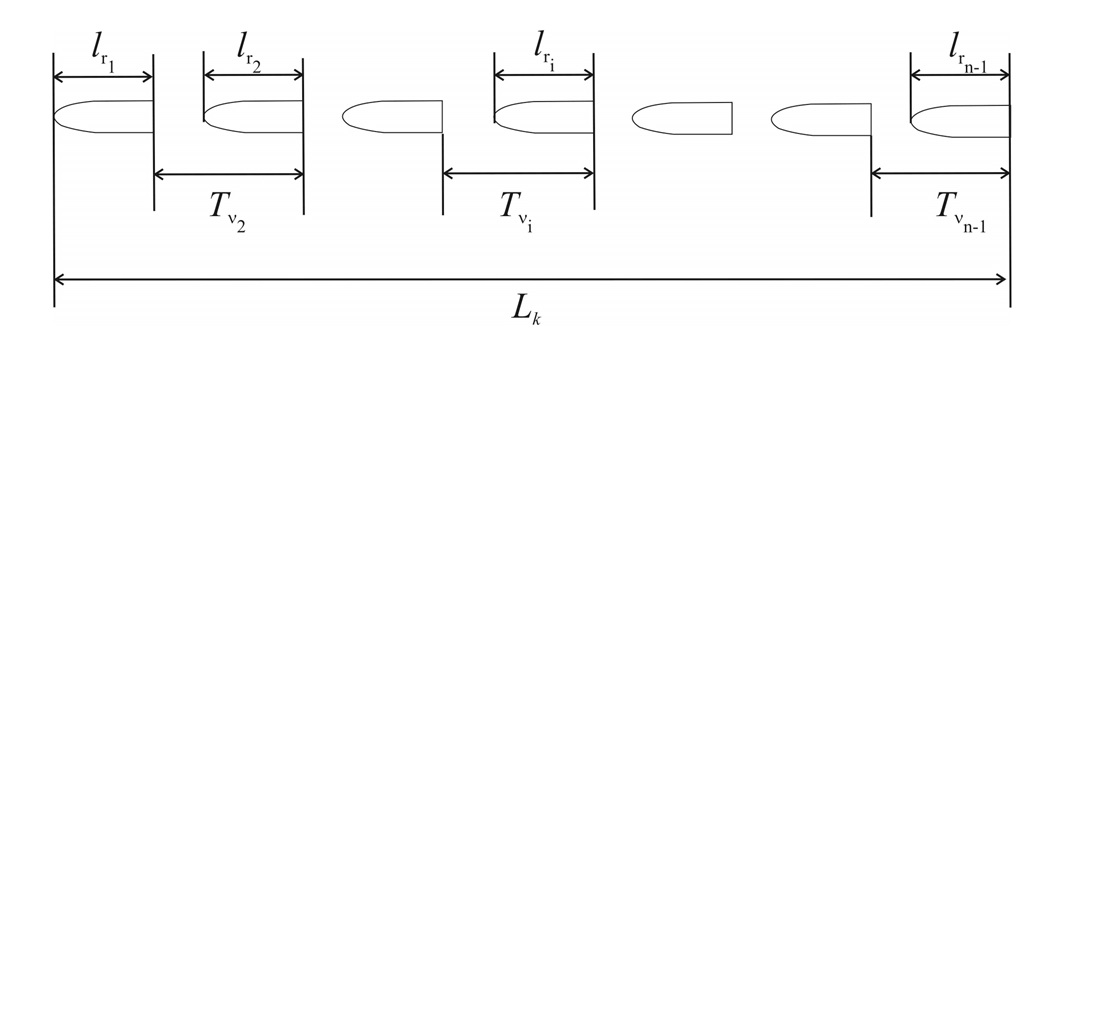
В роботі показано, що при використанні безпілотних транспортних колон показники маневреності та керованості зростають в порівнянні зі звичайними колонами. Так, час проходження ділянок шляху невеликої довжини для колони із 40 машин при швидкості 90 км/год буде скорочено на 60 с, а довжина колони із 20 машин, що рухаються зі швидкістю 90 км/год, на 800 м.
Проведено оцінювання зниження витрат енергії на рух колон з безпілотними автомобілями. Отримана умова, виконання якої забезпечує зниження додаткових втрат енергії двигуна з використанням безпілотних автомобілів у колоні.
Використання отриманих результатів дозволить підвиити ефективність використання автомобільного транспорту до рівня залізничного, що забезпечується створенням автомобільних потягів
Посилання
- Perspektyva vykorystannia bezpilotnykh avtokolon. Available at: https://www.ukrmilitary.com/2021/05/robovehicle.html?m=0
- Podrigalo, M., Klets, D., Podrigalo, N., Abramov, D., Tarasov, Y., Kaidalov, R. et al. (2017). Creation of the energy approach for estimating automobile dynamics and fuel efficiency. Eastern-European Journal of Enterprise Technologies, 5 (7 (89)), 58–64. https://doi.org/10.15587/1729-4061.2017.110248
- Velyka Brytaniya stala pershoiu krainoiu v Yevropi, yaka dozvolyla peresuvatysia dorohamy na avtopiloti. Available at: https://autogeek.com.ua/velyka-brytaniia-stala-pershoiu-krainoiu-v-ievropi-iaka-dozvolyla-peresuvatysia-dorohamy-na-avtopiloti/
- V Turcii predstavili bespilotnyy elektroavtobus sobstvennoy razrabotki. Available at: https://kontrakty.ua/article/170044
- Vpershe u Yevropi: Malaha dozvolyla elektroavtobus bez vodiya na dorohakh mista. Available at: https://www.pravda.com.ua/news/2021/02/26/7284897
- U Vilniusi vpershe v Yevropi pochaly kursuvaty bezpilotni avtomobili. Available at: https://www.lrt.lt/ua/novini/1263/2025524/u-vil-niusi-vpershe-v-evropi-pochali-kursuvati-bezpilotni-avtomobili?srsltid=AfmBOorehFB42ydvhdu9-U6XTGHTlackKIPazWGKZdCBHd2JulEEuEbg
- Kuric, I., Gorobchenko, O., Litikova, O., Gritsuk, I., Mateichyk, V., Bulgakov, M., Klackova, I. (2020). Research of vehicle control informative functioning capacity. IOP Conference Series: Materials Science and Engineering, 776 (1), 012036. https://doi.org/10.1088/1757-899x/776/1/012036
- Mateichyk, V., Saga, M., Smieszek, M., Tsiuman, M., Goridko, N., Gritsuk, I., Symonenko, R. (2020). Information and analytical system to monitor operating processes and environmental performance of vehicle propulsion systems. IOP Conference Series: Materials Science and Engineering, 776 (1), 012064. https://doi.org/10.1088/1757-899x/776/1/012064
- Podrigalo, M., Klets, D., Sergiyenko, O., Gritsuk, I. V., Soloviov, O., Tarasov, Y. et al. (2018). Improvement of the Assessment Methods for the Braking Dynamics with ABS Malfunction. SAE Technical Paper Series. https://doi.org/10.4271/2018-01-1881
- Gnatov, A., Argun, S., Rudenko, N. (2017). Smart road as a complex system of electric power generation. 2017 IEEE First Ukraine Conference on Electrical and Computer Engineering (UKRCON), 457–461. https://doi.org/10.1109/ukrcon.2017.8100531
- Klets, D., Gritsuk, I. V., Makovetskyi, A., Bulgakov, N., Podrigalo, M., Kyrychenko, I. et al. (2018). Information Security Risk Management of Vehicles. SAE Technical Paper Series. https://doi.org/10.4271/2018-01-0015
- Mikhalevich, M., Yarita, A., Turenko, A., Leontiev, D., Gritsuk, I. V., Bogomolov, V. et al. (2018). Assessment of Operation Speed and Precision of Electropneumatic Actuator of Mechanical Transmission Clutch Control System. SAE Technical Paper Series. https://doi.org/10.4271/2018-01-1295
- Bezpilotni elektrovantazhivky. Shcho vidbuvaietsia na rynku ta yak tse vplyne na Ukrainu. Available at: https://tech.liga.net/ua/technology/article/bezpilotni-elektrovantazhivky-shcho-vidbuvaietsia-na-rynku-ta-iak-tse-vplyne-na-ukrainu
- Vachtsevanos, G., Lee, B., Oh, S., Balchanos, M. (2018). Resilient Design and Operation of Cyber Physical Systems with Emphasis on Unmanned Autonomous Systems. Journal of Intelligent & Robotic Systems, 91 (1), 59–83. https://doi.org/10.1007/s10846-018-0881-x
- Mu, D., Wang, G., Fan, Y., Qiu, B., Sun, X. (2019). Adaptive course control based on trajectory linearization control for unmanned surface vehicle with unmodeled dynamics and input saturation. Neurocomputing, 330, 1–10. https://doi.org/10.1016/j.neucom.2018.09.015
- Durst, P. J., Goodin, C. T., Bethel, C. L., Anderson, D. T., Carruth, D. W., Lim, H. (2018). A Perception-Based Fuzzy Route Planing Algorithm for Autonomous Unmanned Ground Vehicles. Unmanned Systems, 06 (04), 251–266. https://doi.org/10.1142/s2301385018500073
- Gottlieb, Y., Manathara, J. G., Shima, T. (2017). Multi-Target Motion Planning Amidst Obstacles for Autonomous Aerial and Ground Vehicles. Journal of Intelligent & Robotic Systems, 90 (3-4), 515–536. https://doi.org/10.1007/s10846-017-0684-5
- Bermúdez, A., Casado, R., Fernández, G., Guijarro, M., Olivas, P. (2019). Drone challenge: A platform for promoting programming and robotics skills in K-12 education. International Journal of Advanced Robotic Systems, 16 (1). https://doi.org/10.1177/1729881418820425
- Batrakova, A., Gredasova, O. (2016). Influence of Road Conditions on Traffic Safety. Procedia Engineering, 134, 196–204. https://doi.org/10.1016/j.proeng.2016.01.060
- Golovan, A., Gritsuk, I., Popeliuk, V., Sherstyuk, O., Honcharuk, I., Symonenko, R. et al. (2020). Features of Mathematical Modeling in the Problems of Determining the Power of a Turbocharged Engine According to the Characteristics of the Turbocharger. SAE Int. J. Engines., 13 (1), 5–16. https://doi.org/10.4271/03-13-01-0001
- Podryhalo, M. A., Sheludchenko, V. V. (2015). Nove v teoriyi ekspluatatsiynykh vlastyvostei avtomobiliv ta traktoriv. Sumy: Sumskyi natsionalnyi ahrarnyi universytet, 213. Available at: https://repo.snau.edu.ua/bitstream/123456789/2859/1/Подригало%20М.%20А.%20Нове%20в%20теорії%20експлуатаційних%20властивостей%20автомобілів%20та%20тракторів.pdf
- Turenko, A., Podrygalo, M., Klets, D., Hatsko, V., Barun, M. (2016). A method of evaluating vehicle controllability according to the dynamic factor. Eastern-European Journal of Enterprise Technologies, 3 (7 (81)), 29–33. https://doi.org/10.15587/1729-4061.2016.72117
- Podrigalo, M., Kaidalov, R., Klets, D., Podrigalo, N., Makovetskyi, A., Hatsko, V. et al. (2018). Synthesis of energyefficient acceleration control law of automobile. Eastern-European Journal of Enterprise Technologies, 1 (7 (91)), 62–70. https://doi.org/10.15587/1729-4061.2018.121568
- Podryhalo, M. A., Kaidalov, R. O., Nikorchuk, A. I. (2012). Manevrenist ta kerovanist avtomobilnykh kolon vnutrishnikh viysk MVS Ukrainy. Vyznachennia poniat ta kryteriyi otsiniuvannia. Zbirnyk naukovykh prats Akademiyi vnutrishnikh viysk MVS Ukrainy, 2 (20), 74–76.
- Ayers, P., Rice, M. (2017). Analysis of vehicle platoon movement and speed-spacing relationships during military exercises. Journal of Terramechanics, 73, 37–47. https://doi.org/10.1016/j.jterra.2017.05.001
- Ju, B. J., Chung, B. D. (2024). Robust convoy movement problem under travel time uncertainty. Transportation Research Part B: Methodological, 190, 103091. https://doi.org/10.1016/j.trb.2024.103091
- Gray, J. P., Vantsevich, V. V. (2015). Multi-vehicle convoy mobility in severe terrain conditions: Factor impact analysis, estimation and control strategy. Journal of Terramechanics, 61, 43–61. https://doi.org/10.1016/j.jterra.2015.04.002
- Li, Q., Li, X. (2022). Trajectory planning for autonomous modular vehicle docking and autonomous vehicle platooning operations. Transportation Research Part E: Logistics and Transportation Review, 166, 102886. https://doi.org/10.1016/j.tre.2022.102886
- Li, J., Fotouhi, A., Liu, Y., Zhang, Y., Chen, Z. (2024). Review on eco-driving control for connected and automated vehicles. Renewable and Sustainable Energy Reviews, 189, 114025. https://doi.org/10.1016/j.rser.2023.114025
- Yao, Z., Wu, Y., Wang, Y., Zhao, B., Jiang, Y. (2023). Analysis of the impact of maximum platoon size of CAVs on mixed traffic flow: An analytical and simulation method. Transportation Research Part C: Emerging Technologies, 147, 103989. https://doi.org/10.1016/j.trc.2022.103989
- Parsadanov, I., Marchenko, A., Tkachuk, M., Kravchenko, S. Polyvianchuk, A., Strokov, A. et al. (2020). Complex Assessment of Fuel Efficiency and Diesel Exhaust Toxicity. SAE Technical Paper. https://doi.org/10.4271/2020-01-2182
- Podrigalo, M., Bogomolov, V., Kholodov, M., Koryak, A., Turenko, A., Kaidalov, R. et al. (2020). Energy Efficiency of Vehicles with Combined Electromechanical Drive of Driving Wheels. SAE Technical Paper Series. https://doi.org/10.4271/2020-01-2260
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Mikhail Podrigalo, Ruslan Kaidalov, Igor Gritsuk, Stanislav Horielyshev, Andrіy Nikorchuk, Dmytro Klets, Serhii Sokolovskyi, Inna Shevchenko, Mykhailo Kholodov, Dmitro Baulin

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







