Розробка методу формування еталонних зображень для забезпечення високоточної навігації безпілотних літальних апаратів при зміні геометричних умов візування
DOI:
https://doi.org/10.15587/1729-4061.2025.330905Ключові слова:
еталонні зображення, навігаційні параметри, дискрети за кутами візування та висотою, інформаційні ознаки, вирішальна функціяАнотація
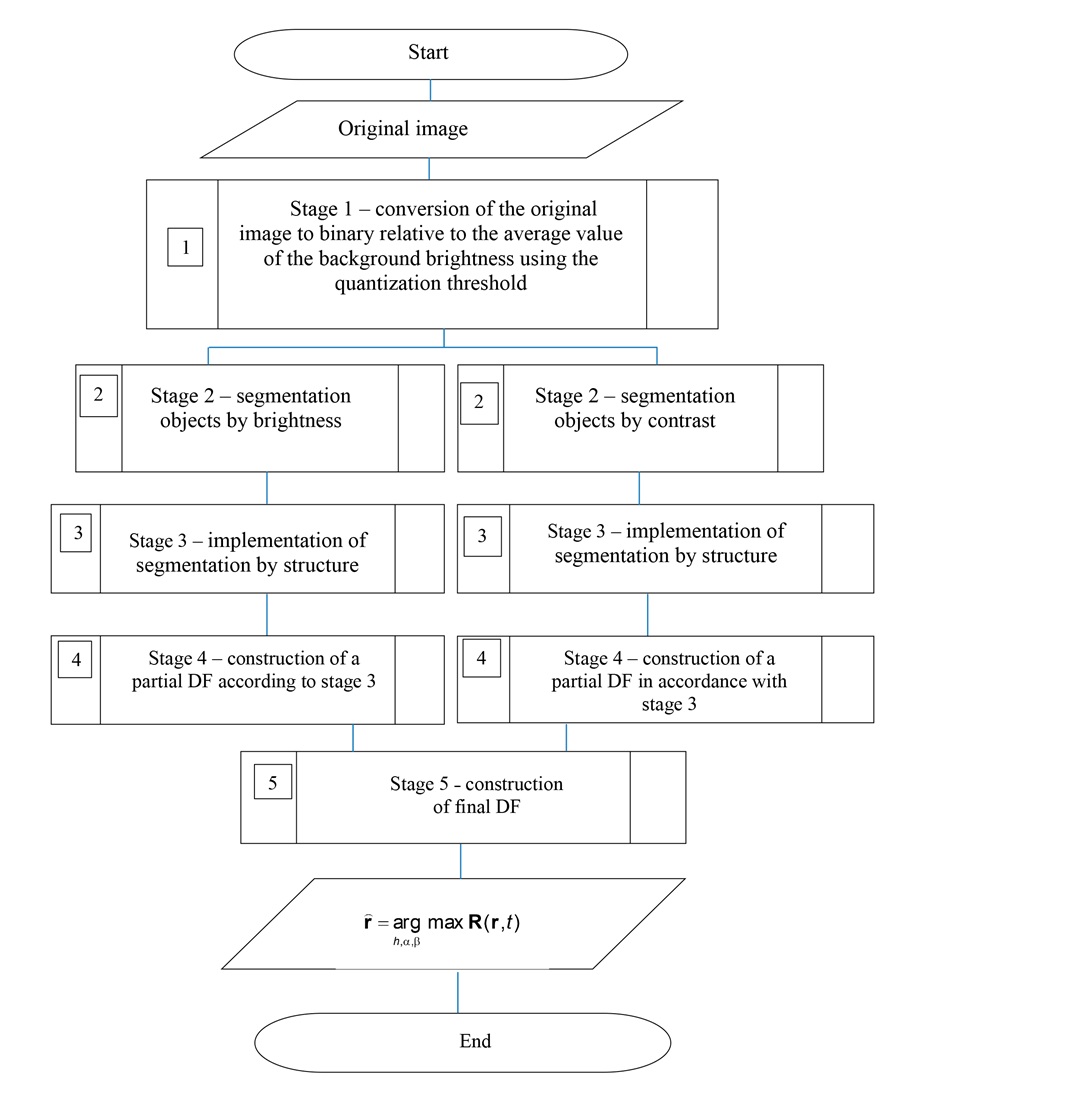
Об'єктом дослідження є процес формування мінімально достатньої сукупності еталонних зображень для застосування в кореляційно-екстремальних системах навігації при зміні навігаційних параметрів безпілотних літальних апаратів. У статті представлені результати розв'язання проблеми формування сукупності еталонних зображень з урахуванням зміни навігаційних параметрів високошвидкісних безпілотних літальних апаратів та їх впливу на інформаційні ознаки зображень. Досліджено вплив зміни кутів візування та висоти на формування сегментованих зображень за енергетичними характеристиками. Встановлено кроки дискрет за навігаційними параметрами, при яких зберігається кореляція між фрагментами зображень на рівні 0.9. Ці значення складають від 90 до 120 метрів за висотою та від 15˚ до 25˚ за кутовими параметрами. Досліджено вплив структури сегментованих зображень на виділення об'єкта прив'язки. Показано, що ознакою виділення об'єкта прив'язки на сегментованому зображенні є значення фрактальної розмірності 2,998…2,999. Дослідження проводилося в програмному середовищі MATLAB з використанням вихідного зображення, вибраного з Google Earth Pro. Використання вибраної послідовності побудови фрагментів еталонних зображень дозволило виявити об'єкти, які мають найкращі характеристики за співвідношенням сигнал/шум та структурою зі зростанням дискретності навігаційних параметрів. Метод відрізняється від відомих використанням в якості інформаційних ознак поряд з яскравістю та контрастом об’єктів структури зображення. Це дозволить зменшити кількість фрагментів еталонних зображень при збереженні показника точності. Отримані результати можуть бути впроваджені в системах вторинної обробки кореляційно-екстремальних систем навігації, що використовуються на високошвидкісних безпілотних літальних апаратах
Посилання
- Kharchenko, V., Mukhina, M. (2014). Correlation-extreme visual navigation of unmanned aircraft systems based on speed-up robust features. Aviation, 18 (2), 80–85. https://doi.org/10.3846/16487788.2014.926645
- Gao, H., Yu, Y., Huang, X., Song, L., Li, L., Li, L., Zhang, L. (2023). Enhancing the Localization Accuracy of UAV Images under GNSS Denial Conditions. Sensors, 23 (24), 9751. https://doi.org/10.3390/s23249751
- Yol, A., Delabarre, B., Dame, A., Dartois, J.-E., Marchand, E. (2014). Vision-based absolute localization for unmanned aerial vehicles. 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 3429–3434. https://doi.org/10.1109/iros.2014.6943040
- Shan, M., Wang, F., Lin, F., Gao, Z., Tang, Y. Z., Chen, B. M. (2015). Google map aided visual navigation for UAVs in GPS-denied environment. 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), 114–119. https://doi.org/10.1109/robio.2015.7418753
- Dalal, N., Triggs, B. (2005). Histograms of Oriented Gradients for Human Detection. 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), 1, 886–893. https://doi.org/10.1109/cvpr.2005.177
- Román, A., Heredia, S., Windle, A. E., Tovar-Sánchez, A., Navarro, G. (2024). Enhancing Georeferencing and Mosaicking Techniques over Water Surfaces with High-Resolution Unmanned Aerial Vehicle (UAV) Imagery. Remote Sensing, 16 (2), 290. https://doi.org/10.3390/rs16020290
- Zhao, X., Li, H., Wang, P., Jing, L. (2020). An Image Registration Method for Multisource High-Resolution Remote Sensing Images for Earthquake Disaster Assessment. Sensors, 20 (8), 2286. https://doi.org/10.3390/s20082286
- Tong, P., Yang, X., Yang, Y., Liu, W., Wu, P. (2023). Multi-UAV Collaborative Absolute Vision Positioning and Navigation: A Survey and Discussion. Drones, 7 (4), 261. https://doi.org/10.3390/drones7040261
- Ali, B., Sadekov, R. N., Tsodokova, V. V. (2022). A Review of Navigation Algorithms for Unmanned Aerial Vehicles Based on Computer Vision Systems. Gyroscopy and Navigation, 13 (4), 241–252. https://doi.org/10.1134/s2075108722040022
- Kan, E. M., Lim, M. H., Ong, Y. S., Tan, A. H., Yeo, S. P. (2012). Extreme learning machine terrain-based navigation for unmanned aerial vehicles. Neural Computing and Applications, 22 (3-4), 469–477. https://doi.org/10.1007/s00521-012-0866-9
- Yeromina, N., Tarshyn, V., Petrov, S., Samoylenko, V., Tabakova, I., Dmitriiev, O. et al. (2021). Method of reference image selection to provide high-speed aircraft navigation under conditions of rapid change of flight trajectory. International Journal of Advanced Technology and Engineering Exploration, 8 (85). https://doi.org/10.19101/ijatee.2021.874814
- Solonar, A. S., Tsuprik, S. V., Khmarskiy, P. A. (2023). Influence of the reference image formation method on the efficiency of the onboard correlation-extreme tracking system for tracking ground objects. Proceedings of the National Academy of Sciences of Belarus, Physical-Technical Series, 68 (2), 167–176. https://doi.org/10.29235/1561-8358-2023-68-2-167-176
- Zhang, X., He, Z., Ma, Z., Wang, Z., Wang, L. (2021). LLFE: A Novel Learning Local Features Extraction for UAV Navigation Based on Infrared Aerial Image and Satellite Reference Image Matching. Remote Sensing, 13 (22), 4618. https://doi.org/10.3390/rs13224618
- Abdollahi, A., Pradhan, B. (2021). Integrated technique of segmentation and classification methods with connected components analysis for road extraction from orthophoto images. Expert Systems with Applications, 176, 114908. https://doi.org/10.1016/j.eswa.2021.114908
- Yeromina, N., Udovovenko, S., Tiurina, V., Boichenko, О., Breus, P., Onishchenko, Y. et al. (2023). Segmentation of Images Used in Unmanned Aerial Vehicles Navigation Systems. Problems of the Regional Energetics, 4 (60), 30–42. https://doi.org/10.52254/1857-0070.2023.4-60.03
- Nuradili, P., Zhou, G., Zhou, J., Wang, Z., Meng, Y., Tang, W., Melgani, F. (2024). Semantic segmentation for UAV low-light scenes based on deep learning and thermal infrared image features. International Journal of Remote Sensing, 45 (12), 4160–4177. https://doi.org/10.1080/01431161.2024.2357842
- Xi, W., Shi, Z., Li, D. (2017). Comparisons of feature extraction algorithm based on unmanned aerial vehicle image. Open Physics, 15 (1), 472–478. https://doi.org/10.1515/phys-2017-0053
- Li, X., Li, Y., Ai, J., Shu, Z., Xia, J., Xia, Y. (2023). Semantic segmentation of UAV remote sensing images based on edge feature fusing and multi-level upsampling integrated with Deeplabv3+. PLOS ONE, 18 (1), e0279097. https://doi.org/10.1371/journal.pone.0279097
- Spasev, V., Dimitrovski, I., Chorbev, I., Kitanovski, I. (2025). Semantic Segmentation of Unmanned Aerial Vehicle Remote Sensing Images Using SegFormer. Intelligent Systems and Pattern Recognition, 108–122. https://doi.org/10.1007/978-3-031-82156-1_9
- Sahragard, E., Farsi, H., Mohamadzadeh, S. (2024). Semantic Segmentation of Aerial Imagery: A Novel Approach Leveraging Hierarchical Multi-scale Features and Channel-based Attention for Drone Applications. International Journal of Engineering, 37 (5), 1022–1035. https://doi.org/10.5829/ije.2024.37.05b.18
- Lu, Z., Qi, L., Zhang, H., Wan, J., Zhou, J. (2022). Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment. Agriculture, 12 (7), 1039. https://doi.org/10.3390/agriculture12071039
- Wang, Z., Zhao, D., Cao, Y. (2022). Image Quality Enhancement with Applications to Unmanned Aerial Vehicle Obstacle Detection. Aerospace, 9 (12), 829. https://doi.org/10.3390/aerospace9120829
- Simantiris, G., Panagiotakis, C. (2024). Unsupervised Color-Based Flood Segmentation in UAV Imagery. Remote Sensing, 16 (12), 2126. https://doi.org/10.3390/rs16122126
- Li, J., Wu, Y., Zhang, H., Wang, H. (2023). A Novel Unsupervised Segmentation Method of Canopy Images from UAV Based on Hybrid Attention Mechanism. Electronics, 12 (22), 4682. https://doi.org/10.3390/electronics12224682
- Zhang, X., Du, B., Wu, Z., Wan, T. (2022). LAANet: lightweight attention-guided asymmetric network for real-time semantic segmentation. Neural Computing and Applications, 34 (5), 3573–3587. https://doi.org/10.1007/s00521-022-06932-z
- Song, Y., Shang, C., Zhao, J. (2023). LBCNet: A lightweight bilateral cascaded feature fusion network for real-time semantic segmentation. The Journal of Supercomputing, 80 (6), 7293–7315. https://doi.org/10.1007/s11227-023-05740-z
- Sotnikov, A., Tiurina, V., Petrov, K., Lukyanova, V., Lanovyy, O., Onishchenko, Y. et al. (2024). Using the set of informative features of a binding object to construct a decision function by the system of technical vision when localizing mobile robots. Eastern-European Journal of Enterprise Technologies, 3 (9 (129)), 60–69. https://doi.org/10.15587/1729-4061.2024.303989
- Sotnikov, O., Tymochko, O., Bondarchuk, S., Dzhuma, L., Rudenko, V., Mandryk, Ya. et al. (2023). Generating a Set of Reference Images for Reliable Condition Monitoring of Critical Infrastructure using Mobile Robots. Problems of the Regional Energetics, 2 (58), 41–51. https://doi.org/10.52254/1857-0070.2023.2-58.04
- Sotnikov, O., Sivak, V., Pavlov, Ya., Нashenko, S., Borysenko, T., Torianyk, D. (2024). Selection of the Binding Object on the Current Image Formed by the Technical Vision System Using Structural and Geometric Features. Problems of the Regional Energetics, 3 (63), 92–103. https://doi.org/10.52254/1857-0070.2024.3-63.08
- Pan, Z., Xu, J., Guo, Y., Hu, Y., Wang, G. (2020). Deep Learning Segmentation and Classification for Urban Village Using a Worldview Satellite Image Based on U-Net. Remote Sensing, 12 (10), 1574. https://doi.org/10.3390/rs12101574
- Porev, V. A. (2015). Televiziyni informatsiyno-vymiriuvalni systemy. Kyiv, 218.
- Balytska, N., Prylypko, O., Shostachuk, A., Hlembotska, L., Melnyk, O. (2023). Analysis of correlations between the fractal dimension and parameters of milled surface roughness. Technical Engineering, 1 (91), 26–33. https://doi.org/10.26642/ten-2023-1(91)-26-33
- Berezskij, O. N., Berezskaja, K. M. (2015). Quantified Estimation of Image Segmentation Quality Based on Metrics. Control systems and machines, 6, 59–65. Available at: http://jnas.nbuv.gov.ua/article/UJRN-0000515848
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Alexander Sotnikov, Ruslan Sydorenko, Serhii Mykus, Serhii Zakirov, Ihor Vlasov, Oleksandr Shkvarskyi, Yuriy Samsonov, Andrii Petik, Andrii Nechaus, Oleh Rikunov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






