Predicting robotic platform missions using a kernel activation network with an asymmetric kernel
DOI:
https://doi.org/10.15587/1729-4061.2025.340833Keywords:
functional prediction, factor interaction, asymmetric kernel, neural network, robotic platformAbstract
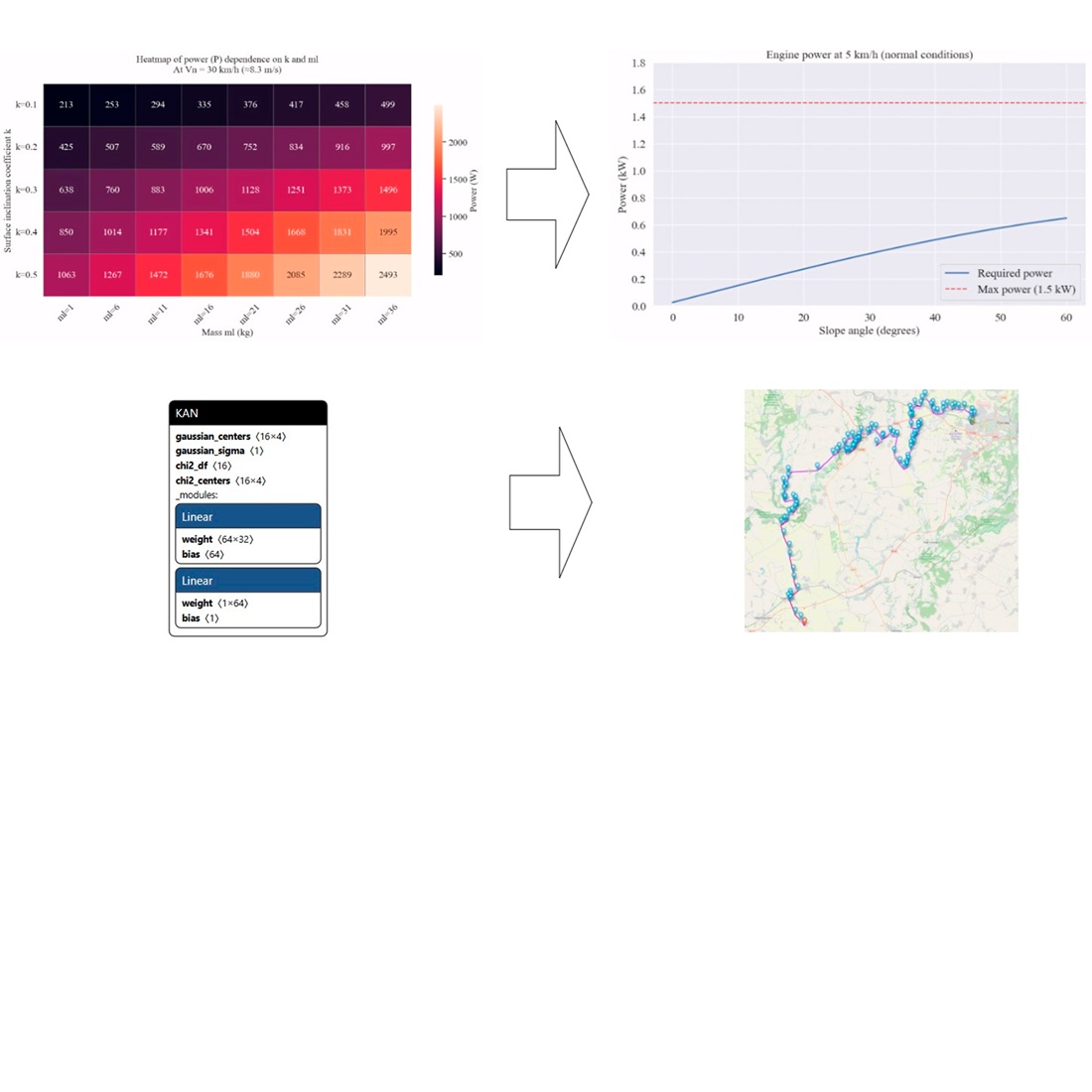
This study considers those processes predicting the functional efficiency of robotic platforms that affect the optimization of their mission planning. Given the growing demand for autonomous mobile systems, a critical task is to ensure high efficiency of their dynamics under different loads, terrains, and speeds, which requires reliable tools for decision-making even before physical launch.
To solve the task, a method based on a customized Kernel Activation Network (KAN) was devised and programmatically implemented to predict the functional efficiency of the platform. The results demonstrate a significant increase in accuracy: KAN achieves an MSE of 0.00055727 on synthetic data and 0.00041720 on the experimental sample, while other architectures demonstrate 0.00105989 and higher.
The key innovation of KAN is the use of an asymmetric chi-square kernel in parallel with the Gaussian kernel, as well as the integration of input estimates that take into account the triple interaction of factors. This explains the network's ability to effectively capture complex nonlinear dependences between numerous platform parameters (rolling resistance, aerodynamic drag, climbing force, etc.) and environmental conditions. The use of an asymmetric kernel significantly simplifies the network architecture, allowing for high accuracy at lower computational complexity.
In practice, the results serve as an additional tool for optimizing mission planning of robotic platforms. This makes it possible to optimize equipment selection, construct strategic logistics routes, and increase the safety and reliability of autonomous systems under actual conditions. The achieved Technology Readiness Level is 4
References
- Yanko, A., Pedchenko, N., Kruk, O. (2024). Enhancing the protection of automated ground robotic platforms in the conditions of radio electronic warfare. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 6, 136–142. https://doi.org/10.33271/nvngu/2024-6/136
- Papadopoulos, C., Mitridis, D., Yakinthos, K. (2022). Conceptual Design of a Novel Unmanned Ground Effect Vehicle (UGEV) and Flow Control Integration Study. Drones, 6 (1), 25. https://doi.org/10.3390/drones6010025
- Yanko, A., Krasnobayev, V., Martynenko, A. (2023). Influence of the number system in residual classes on the fault tolerance of the computer system. Radioelectronic and Computer Systems, 3, 159–172. https://doi.org/10.32620/reks.2023.3.13
- Krasnobayev, V., Yanko, A., Kovalchuk, D. (2023). Control, Diagnostics and Error Correction in the Modular Number System. Computer Modeling and Intelligent Systems, 3392, 199–213. https://doi.org/10.32782/cmis/3392-17
- Trujillo, J.-C., Munguia, R., Grau, A. (2021). Aerial Cooperative SLAM for Ground Mobile Robot Path Planning. The 8th International Symposium on Sensor Science, 65. https://doi.org/10.3390/i3s2021dresden-10164
- Asiminari, G., Moysiadis, V., Kateris, D., Busato, P., Wu, C., Achillas, C. et al. (2024). Integrated Route-Planning System for Agricultural Robots. AgriEngineering, 6 (1), 657–677. https://doi.org/10.3390/agriengineering6010039
- Yu, S., Hirche, M., Huang, Y., Chen, H., Allgöwer, F. (2021). Model predictive control for autonomous ground vehicles: a review. Autonomous Intelligent Systems, 1 (1). https://doi.org/10.1007/s43684-021-00005-z
- Macaulay, M. O., Shafiee, M. (2022). Machine learning techniques for robotic and autonomous inspection of mechanical systems and civil infrastructure. Autonomous Intelligent Systems, 2 (1). https://doi.org/10.1007/s43684-022-00025-3
- Rybczak, M., Popowniak, N., Lazarowska, A. (2024). A Survey of Machine Learning Approaches for Mobile Robot Control. Robotics, 13 (1), 12. https://doi.org/10.3390/robotics13010012
- Golub, V., Bisyk, S., Golub, G., Tsyvenkova, N., Sedov, S., Nadykto, V. et al. (2025). Devising a method for categorizing combat wheeled vehicles using fuzzy cluster analysis. Eastern-European Journal of Enterprise Technologies, 2 (1 (134)), 13–21. https://doi.org/10.15587/1729-4061.2025.324546
- Laktionov, O., Yanko, A., Pedchenko, N. (2024). Identification of air targets using a hybrid clustering algorithm. Eastern-European Journal of Enterprise Technologies, 5 (4 (131)), 89–95. https://doi.org/10.15587/1729-4061.2024.314289
- Barus, E. S., Zarlis, M., Nasution, Z., Sutarman, S. (2025). Development of machine learning for forecasting optimization implemented in morphology plant growth. Eastern-European Journal of Enterprise Technologies, 3 (2 (135)), 42–53. https://doi.org/10.15587/1729-4061.2025.331745
- Harumy, H. F., Ginting, D. S., Manik, F. Y., Yel, M. B. (2025). Dominant disaster detection and prediction in coastal areas using neural network system to optimize disaster management in coastal areas. Eastern-European Journal of Enterprise Technologies, 2 (2 (134)), 6–16. https://doi.org/10.15587/1729-4061.2025.321966
- Laktionov, A. (2021). Improving the methods for determining the index of quality of subsystem element interaction. Eastern-European Journal of Enterprise Technologies, 6 (3 (114)), 72–82. https://doi.org/10.15587/1729-4061.2021.244929
- Bai, Y. (2022). RELU-Function and Derived Function Review. SHS Web of Conferences, 144, 02006. https://doi.org/10.1051/shsconf/202214402006
- Bolohin, A., Bolohina, Y., Tymchuk, Y. (2025). Ranking of the technical condition of aircraft according to the diagnostic data of the glider design. System Research and Information Technologies, 2, 98–105. https://doi.org/10.20535/srit.2308-8893.2025.2.06
- Hryshchuk, O., Zagorodnyuk, S. (2025). Managing energy consumption in FPGA-based edge computing systems with soft-core CPUs. Journal of Edge Computing, 4 (1), 57–72. https://doi.org/10.55056/jec.717
- Kumar Malik, M., Joshi, H., Swaroop, A. (2025). An Effective Hybrid HBA-MAO for Task Scheduling with a Hybrid Fault-Tolerant Approach in Cloud Environment. International Journal of Image, Graphics and Signal Processing, 17 (4), 68–86. https://doi.org/10.5815/ijigsp.2025.04.05
- Sveshnikov, S., Bocharnikov, V., Mudrak, Y. (2024). Evaluation and choice of an anti-aircraft missile system under uncertain conditions based on fuzzy-integral calculus and hierarchical cluster analysis. Operations Research and Decisions, 34 (2). https://doi.org/10.37190/ord240209
- Lutsyk, Y., Parkhomenko, P., Demeniev, O., Alimov, D. (2023). Analysis of the defense planning system based on the capabilities taking into account the leading experience of NATO member states. Modern Economics, 41, 73–78. https://doi.org/10.31521/modecon.v41(2023)-11
- Manziuk, E. (2022). Intelligent information technology for obtaining trust decisions based on the ontology of trust in a human-centered approach. Computer Systems and Information Technologies, 1, 83–88. https://doi.org/10.31891/csit-2022-1-11
- Volkov, V., Taran, I., Volkova, T., Pavlenko, O., Berezhnaja, N. (2020). Determining the efficient management system for a specialized transport enterprise. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 4, 185–191. https://doi.org/10.33271/nvngu/2020-4/185
- Bazarnyi, S., Husak, Y., Voitko, T., Aliew, F., Yevseiev, S. (2025). Mathematical model of multi-domain interaction based on game theory. Advanced Information Systems, 9 (3), 22–31. https://doi.org/10.20998/2522-9052.2025.3.03
- Ponochovniy, Y., Bulba, E., Yanko, A., Hozbenko, E. (2018). Influence of diagnostics errors on safety: Indicators and requirements. 2018 IEEE 9th International Conference on Dependable Systems, Services and Technologies (DESSERT), 53–57. https://doi.org/10.1109/dessert.2018.8409098
- Yanko, A., Hlushko, A., Onyshchenko, S., Maslii, O. (2023). Economic cybersecurity of business in Ukraine: strategic directions and implementation mechanism. Economic and Cyber Security, 30–58. https://doi.org/10.15587/978-617-7319-98-5.ch2
- Jarema, R. (2018). 10 Steps to Choosing the Right Motors for Your Robotic Project. Husarion Blog, Medium. Available at: https://medium.com/husarion-blog/10-steps-to-choosing-the-right-motors-for-your-robotic-project-bf5c4b997407
- Larminie, J., Lowry, J. (2012). Electric Vehicle Technology Explained. John Wiley & Sons. https://doi.org/10.1002/9781118361146
- MinMaxScaler. Scikit-learn developers. Available at: https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.MinMaxScaler.html
- StandardScaler. Scikit-learn developers. Available at: https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.StandardScaler.html
- Berrar, D. (2019). Cross-Validation. Encyclopedia of Bioinformatics and Computational Biology, 542–545. https://doi.org/10.1016/b978-0-12-809633-8.20349-x
- BRouter-Web. BRouter. Available at: https://brouter.de/brouter-web
- torch. PyPI. Available at: https://pypi.org/project/torch/
- Netron. Netron developers. Available at: https://netron.app/
- Onyshchenko, S., Zhyvylo, Y., Hlushko, A., Bilko, S. (2024). Cyber risk management technology to strengthen the information security of the national economy. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 5, 136–142. https://doi.org/10.33271/nvngu/2024-5/136
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Oleksandr Laktionov, Alina Yanko, Bohdan Boriak, Oleksii Mykhailichenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





