Synthesis of a controller for quadrotors with suspended payloads
DOI:
https://doi.org/10.15587/1729-4061.2025.342109Keywords:
sliding mode control, extended state observer, unmanned aerial vehicle, trajectoryAbstract
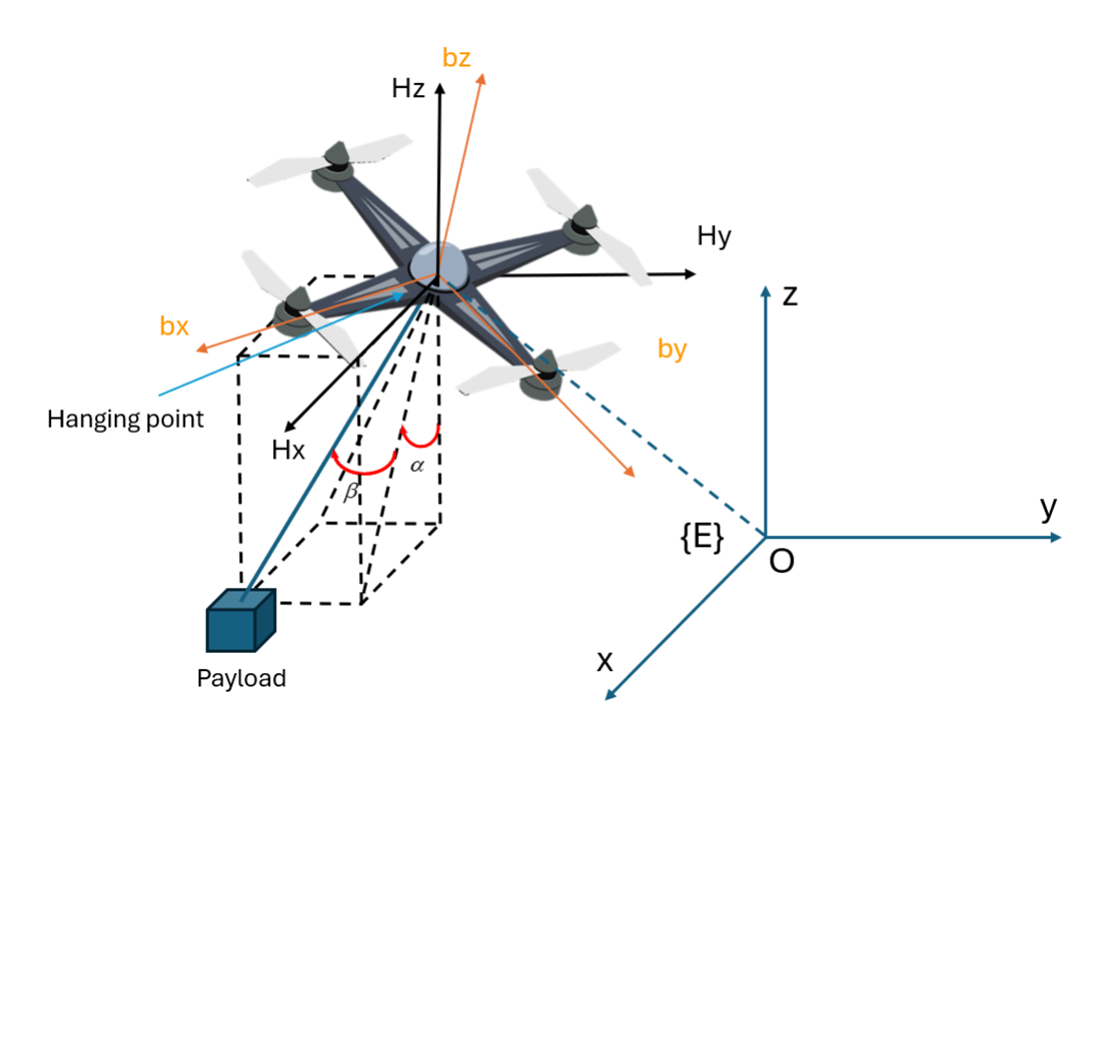
The object of this study is the control of quadrotor. Unmanned aerial vehicles currently in use often encounter various challenges and limitations. When operating in environments affected by external disturbances-particularly, when carrying suspended loads via cables, the control problem becomes significantly more complex. As a result, the quadrotor is unable to accurately follow the predefined flight trajectory.
Problem that was solved is the synthesis of a new controller for the quadrotor with a cable-suspended load, ensuring that the quadrotor accurately follows the predefined flight trajectory. The proposed algorithm demonstrates a significant improvement over existing methods by effectively suppressing the oscillation angle of the suspended payload, treating the payload’s influence as an external disturbance. Furthermore, it constrains the swing angle within an acceptable range, thereby ensuring the stability and robustness of the overall system during operation.
This study presents a novel control algorithm capable of guiding the quadrotor precisely to the desired position, even under the condition of carrying a cable-suspended load in a varying environment. The algorithm demonstrates a significant advantage, enabling the quadrotor to reach the desired trajectory within 2.6 seconds. The suspended load exhibits only small oscillations, which gradually diminish as the quadrotor transitions to a stable state. With its simple structure, high stability, and fast convergence, this robust solution is essential for unmanned aerial vehicles, significantly enhancing their operational effectiveness under complex conditions.
A key strength of the proposed algorithm lies in its simple structure. Furthermore, it demonstrates high convergence rates and exceptional stability, crucial attributes for real-time applications. Its design also ensures ease of practical implementation, making it a viable solution for unmanned aerial vehicles.
The algorithm is developed based on modern control techniques, combining a sliding mode controller with an extended state observer. The SMC maintains system stability in the presence of disturbances and uncertainties, while the ESO estimates unmeasured states and aggregated disturbances affecting the system. This design ensures accurate positioning of the quadrotor with a suspended load at the desired location
References
- Lin, S., Liu, A., Wang, J., Kong, X. (2022). A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines, 10 (9), 773. https://doi.org/10.3390/machines10090773
- Loganathan, A., Ahmad, N. S. (2023). A systematic review on recent advances in autonomous mobile robot navigation. Engineering Science and Technology, an International Journal, 40, 101343. https://doi.org/10.1016/j.jestch.2023.101343
- Liu, Y., Wang, S., Xie, Y., Xiong, T., Wu, M. (2024). A Review of Sensing Technologies for Indoor Autonomous Mobile Robots. Sensors, 24 (4), 1222. https://doi.org/10.3390/s24041222
- Niloy, Md. A. K., Shama, A., Chakrabortty, R. K., Ryan, M. J., Badal, F. R., Tasneem, Z. et al. (2021). Critical Design and Control Issues of Indoor Autonomous Mobile Robots: A Review. IEEE Access, 9, 35338–35370. https://doi.org/10.1109/access.2021.3062557
- Sousa, R. B., Sobreira, H. M., Moreira, A. P. (2023). A systematic literature review on long‐term localization and mapping for mobile robots. Journal of Field Robotics, 40 (5), 1245–1322. https://doi.org/10.1002/rob.22170
- Kabir, H., Tham, M.-L., Chang, Y. C. (2023). Internet of robotic things for mobile robots: Concepts, technologies, challenges, applications, and future directions. Digital Communications and Networks, 9 (6), 1265–1290. https://doi.org/10.1016/j.dcan.2023.05.006
- Gielis, J., Shankar, A., Prorok, A. (2022). A Critical Review of Communications in Multi-robot Systems. Current Robotics Reports, 3 (4), 213–225. https://doi.org/10.1007/s43154-022-00090-9
- Garaffa, L. C., Basso, M., Konzen, A. A., de Freitas, E. P. (2023). Reinforcement Learning for Mobile Robotics Exploration: A Survey. IEEE Transactions on Neural Networks and Learning Systems, 34 (8), 3796–3810. https://doi.org/10.1109/tnnls.2021.3124466
- Orr, J., Dutta, A. (2023). Multi-Agent Deep Reinforcement Learning for Multi-Robot Applications: A Survey. Sensors, 23 (7), 3625. https://doi.org/10.3390/s23073625
- Sun, H., Zhang, W., Yu, R., Zhang, Y. (2021). Motion Planning for Mobile Robots – Focusing on Deep Reinforcement Learning: A Systematic Review. IEEE Access, 9, 69061–69081. https://doi.org/10.1109/access.2021.3076530
- Zhu, K., Zhang, T. (2021). Deep reinforcement learning based mobile robot navigation: A review. Tsinghua Science and Technology, 26 (5), 674–691. https://doi.org/10.26599/tst.2021.9010012
- Cohen, S., Agmon, N. (2021). Recent Advances in Formations of Multiple Robots. Current Robotics Reports, 2 (2), 159–175. https://doi.org/10.1007/s43154-021-00049-2
- Rafai, A. N. A., Adzhar, N., Jaini, N. I. (2022). A Review on Path Planning and Obstacle Avoidance Algorithms for Autonomous Mobile Robots. Journal of Robotics, 2022, 1–14. https://doi.org/10.1155/2022/2538220
- Cho, S. W., Park, H. J., Lee, H., Shim, D. H., Kim, S.-Y. (2021). Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Computers & Industrial Engineering, 161, 107612. https://doi.org/10.1016/j.cie.2021.107612
- Omar, H. M., Akram, R., Mukras, S. M. S., Mahvouz, A. A. (2023). Recent advances and challenges in controlling quadrotors with suspended loads. Alexandria Engineering Journal, 63, 253–270. https://doi.org/10.1016/j.aej.2022.08.001
- Liang, X., Yu, H., Zhang, Z., Liu, H., Fang, Y., Han, J. (2023). Unmanned Aerial Transportation System With Flexible Connection Between the Quadrotor and the Payload: Modeling, Controller Design, and Experimental Validation. IEEE Transactions on Industrial Electronics, 70 (2), 1870–1882. https://doi.org/10.1109/tie.2022.3163526
- Huang, J., Tao, H., Wang, Y., Sun, J.-Q. (2023). Suppressing UAV payload swing with time-varying cable length through nonlinear coupling. Mechanical Systems and Signal Processing, 185, 109790. https://doi.org/10.1016/j.ymssp.2022.109790
- Xinyu, C., Yongsheng, Z., Yunsheng, F. (2020). Adaptive Integral Backstepping Control for a Quadrotor with Suspended Flight. 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), 226–234. https://doi.org/10.1109/cacre50138.2020.9229913
- Van Trieu, P., Cuong, H. M., Dong, H. Q., Tuan, N. H., Tuan, L. A. (2021). Adaptive fractional-order fast terminal sliding mode with fault-tolerant control for underactuated mechanical systems: Application to tower cranes. Automation in Construction, 123, 103533. https://doi.org/10.1016/j.autcon.2020.103533
- Basal, M. A. (2025). Advanced Sliding Mode Control with Disturbance Rejection Techniques for Multi-DOF Robotic Systems. Journal of Robotics and Control, 6 (4), 1612–1623. https://doi.org/10.18196/jrc.v6i4.25779
- Labbadi, M., Boukal, Y., Cherkaoui, M. (2022). Advanced Robust Nonlinear Control Approaches for Quadrotor Unmanned Aerial Vehicle. In Studies in Systems, Decision and Control. Springer International Publishing. https://doi.org/10.1007/978-3-030-81014-6
- Tokat, S., Fadali, M. S., Eray, O. (2015). A Classification and Overview of Sliding Mode Controller Sliding Surface Design Methods. Recent Advances in Sliding Modes: From Control to Intelligent Mechatronics, 417–439. https://doi.org/10.1007/978-3-319-18290-2_20
- Liu, J., Wang, X. (2011). Advanced Sliding Mode Control for Mechanical Systems. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-20907-9
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Nguyen Thi Dieu Linh, Nguyen Van Bang

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





