Удосконалення керування об'єктами на основі технології інтернету речей за вмісту змінних затримок у мережі керування
DOI:
https://doi.org/10.15587/1729-4061.2026.352195Ключові слова:
Інтернет речей, PID-регулятори, керування, контролери, негативний зворотний зв'язок, нестаціонарні об'єкти, затримка часу, космічні системиАнотація
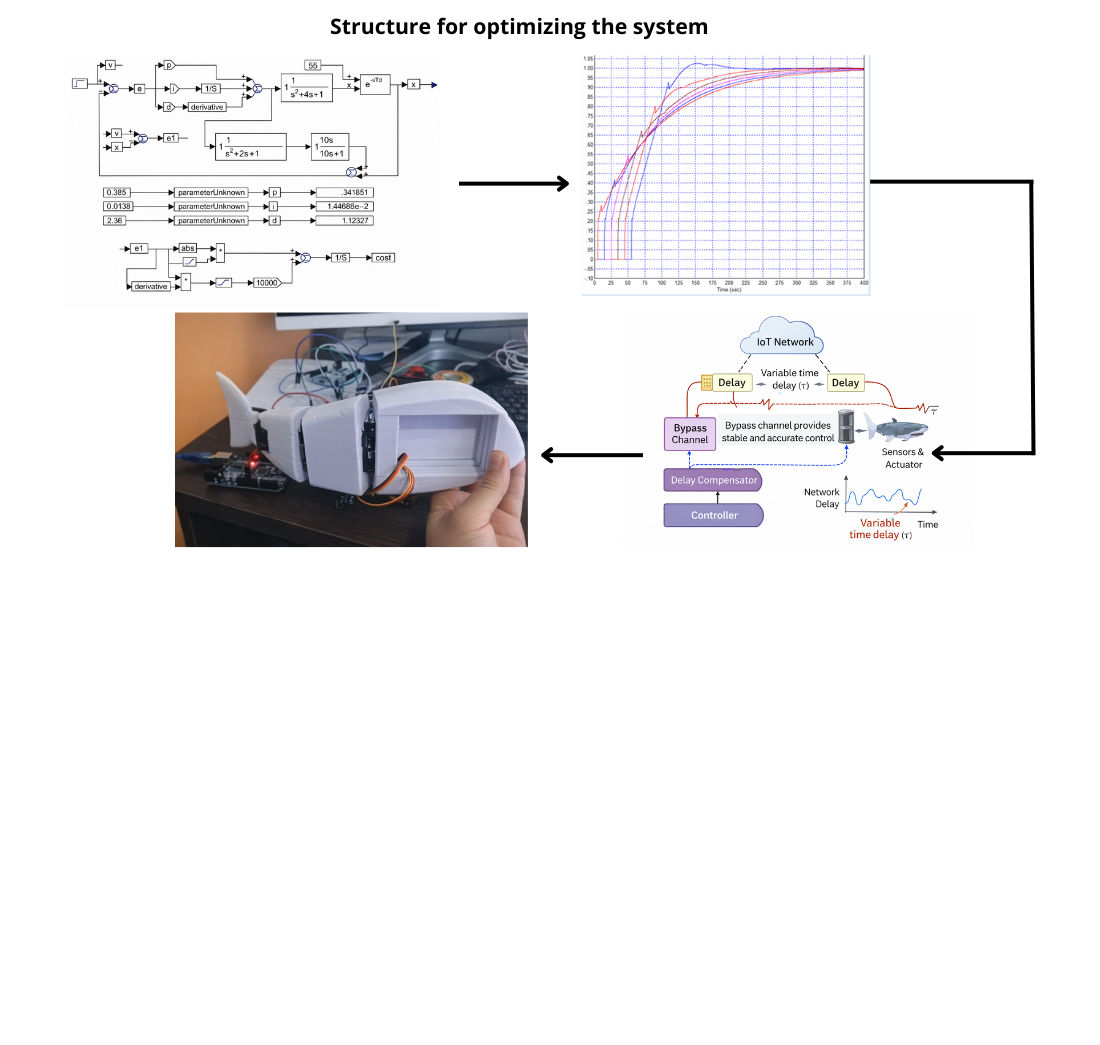
Дослідження зосереджене на розподілених системах керування об'єктами, на які впливають різні та непередбачувані затримки, як у наземних, так і в космічних застосуваннях. У ньому розглядається, як ці затримки впливають на стабільність і точність систем дистанційного керування, особливо в середовищах зі змінним часом передачі. Основною проблемою, що розглядається, є нестабільність, спричинена змінними затримками в системах керування на основі Інтернету речей, які впливають як наземні системи (такі як розумні будинки та промислова автоматизація), так і на космічні місії (такі як керування космічними об'єктами з Землі). Завдання полягає в забезпеченні стабільного та точного керування, незважаючи на непередбачувані затримки в каналах зв'язку.
Запропоновано нову конструкцію системи керування, що включає унікальну структуру контролера з обхідним каналом для забезпечення стабільності за змінних затримок. Система була перевірена за допомогою математичного моделювання, показавши максимальне перевищення 3% у конфігурації PID та майже повне усунення перевищення з обхідним каналом. Вона перевершує традиційні методи, такі як предиктор Сміта, який виходить з ладу, коли затримки відхиляються всього на 1–3%. Запропонована система забезпечує стабільне та точне керування як у наземних застосуваннях Інтернету речей, ефективно обробляючи непередбачувані затримки та підтримуючи продуктивність у реальному часі
Посилання
- Atzori, L., Iera, A., Morabito, G. (2010). The Internet of Things: A survey. Computer Networks, 54 (15), 2787–2805. https://doi.org/10.1016/j.comnet.2010.05.010
- Friess, P., Vermesan, O. (2022). Internet of Things Applications - From Research and Innovation to Market Deployment. River Publishers. https://doi.org/10.1201/9781003338628
- Hespanha, J. P., Naghshtabrizi, P., Xu, Y. (2007). A Survey of Recent Results in Networked Control Systems. Proceedings of the IEEE, 95 (1), 138–162. https://doi.org/10.1109/jproc.2006.887288
- Zhang, X.-M., Han, Q.-L., Ge, X., Ding, D., Ding, L., Yue, D., Peng, C. (2020). Networked control systems: a survey of trends and techniques. IEEE/CAA Journal of Automatica Sinica, 7 (1), 1–17. https://doi.org/10.1109/jas.2019.1911651
- Szymanski, T. H. (2017). Security and Privacy for a Green Internet of Things. IT Professional, 19 (5), 34–41. https://doi.org/10.1109/mitp.2017.3680952
- Dai, S.-L., Lin, H., Ge, S. S. (2010). Scheduling-and-Control Codesign for a Collection of Networked Control Systems With Uncertain Delays. IEEE Transactions on Control Systems Technology, 18 (1), 66–78. https://doi.org/10.1109/tcst.2008.2010459
- Zhmud, V., Sablina, G., Dimitrov, L., Trubin, V. (2016). The use of bypass channel for feedback control of oscillatory object well-known as difficult one for control. 2016 International Siberian Conference on Control and Communications (SIBCON), 1–6. https://doi.org/10.1109/sibcon.2016.7491767
- Tutkyshbayeva, S., Zakirova, A. (2024). Analysing IoT Digital Education: Fostering Students’ Understanding and Digital Literacy. International Journal of Engineering Pedagogy (IJEP), 14 (4), 4–23. https://doi.org/10.3991/ijep.v14i4.45489
- Choi, J.-Y., Krstic, M. (2015). Compensation of time-varying input delay for discrete-time nonlinear systems. International Journal of Robust and Nonlinear Control, 26 (8), 1755–1776. https://doi.org/10.1002/rnc.3382
- Bahill, A. (1983). A simple adaptive Smith-predictor for controlling time-delay systems: A tutorial. IEEE Control Systems Magazine, 3 (2), 16–22. https://doi.org/10.1109/mcs.1983.1104748
- Tavakoli, S. (2024). Analytical design of modified Smith predictor for second-order stable time delay plants incorporating a zero. Franklin Open, 8, 100140. https://doi.org/10.1016/j.fraope.2024.100140
- Zong, Y., Dai, X., Wei, Z., Zou, M., Guo, W., Gao, Z. (2023). Robust Time Synchronization for Industrial Internet of Things by H ∞ Output Feedback Control. IEEE Internet of Things Journal, 10 (3), 2021–2030. https://doi.org/10.1109/jiot.2022.3144199
- Zhmud, V., Hardt, W., Stukach, O., Dimitrov, L., Nosek, J. (2019). The Parameter Optimization of the PID and PIDD Controller for a Discrete Object. 2019 Dynamics of Systems, Mechanisms and Machines (Dynamics), 1–6. https://doi.org/10.1109/dynamics47113.2019.8944718
- Mishra, P., Patjoshi, R. K., Yadav, A. K. (2023). A Delay Compensation Approach for IoT-Enabled Networks with Different Control Strategies. 2023 Fifth International Conference on Electrical, Computer and Communication Technologies (ICECCT), 1–5. https://doi.org/10.1109/icecct56650.2023.10179610
- Sembayev, T., Nurbekova, Z., Tazabekova, P., Baigusheva, K., Naimanova, D. (2024). Enhancing educational resources through augmented reality-based assessment materials: a comprehensive study. Proceedings of the International Conference on Computer Systems and Technologies 2024, 213–220. https://doi.org/10.1145/3674912.3674927
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2026 Shyryn Tutkyshbayeva, Alma Zakirova, Bakyt Nurbekov, Nurzhamal Kashkimbayeva

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







