Динамічна модель прогнозування ризику для автономних суден з врахуванням невизначеності та стійкості систем управління
DOI:
https://doi.org/10.31498/2225-6733.52.2025.351119Ключові слова:
автономне судноплавство, експлуатаційний ризик, морський транспорт, системи судна, індекс ризику, електронна навігація, адаптивне управління, прогнозування ризику, поведінка екіпажу, морське середовище, критичні сценарії, ситуаційна обізнаність, багатофакторна оцінка, відмова підсистем, симуляція аварій, невизначеність, ризик-орієнтоване управління, суднові операції, навігаційна безпека, система підтримки рішень, інтелектуальні навігаційні системи, інфраструктура порту, транспортна безпека, вплив людського факторуАнотація
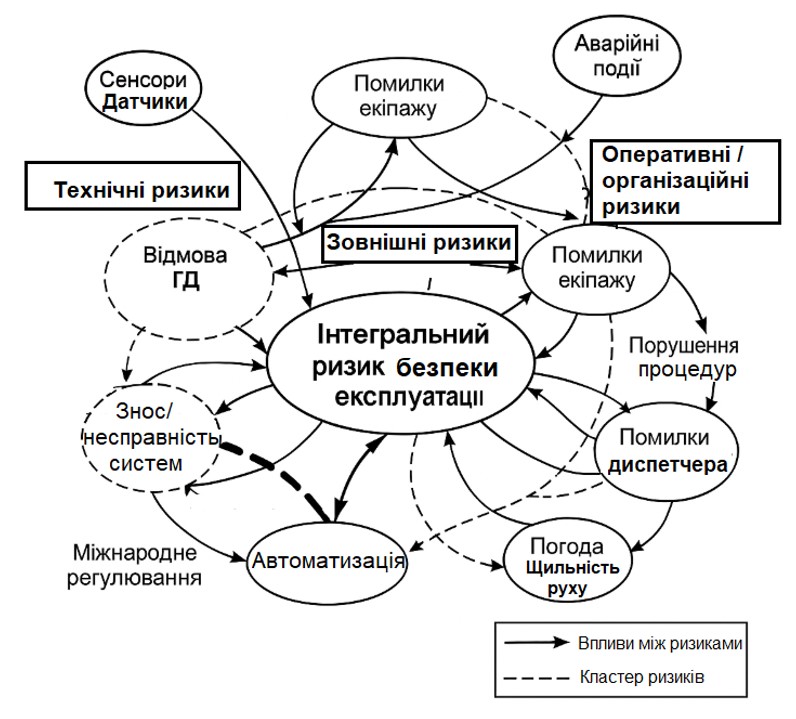
У даній статті представлено комплексний підхід до прогнозування експлуатаційного ризику автономного морського судна в умовах високої невизначеності, деградації технічних систем і змінних умов середовища. Традиційні методи управління ризиком виявляються недостатньо ефективними у ситуаціях, коли відсутній постійний контроль з боку оператора, тому в статті запропоновано динамічну адаптивну модель, що враховує як внутрішні (технічні та поведінкові) фактори, так і зовнішні навантаження (погодні умови, щільність руху, інформаційні збої). Основу моделі становить інтегрований індекс ризику (SIRI), який синтезує вплив деградації безпекових бар’єрів, ймовірність збоїв підсистем, поведінкові відхилення екіпажу (у разі часткової автономії), а також невизначеність у вхідних даних. Для оцінки майбутніх станів системи застосовано методи глибинного навчання, зокрема LSTM-архітектури, що дозволяють аналізувати часову динаміку ризику. Модифікатори поведінки екіпажу вводяться у вигляді коефіцієнтів впливу на ефективність бар’єрів, що дозволяє імітувати сценарії втоми, неуважності або помилок оператора. Представлена модель включає експоненційні функції деградації, ймовірнісні розподіли невизначеності та рекурентні схеми прогнозування і запропоновано верифікацію на прикладах чисельного експерименту, де порівнюються базові, стресові та комбіновані сценарії, включаючи каскадні відмови, втрату контролю та зовнішні збурення. Отримані результати засвідчили здатність системи своєчасно виявляти загрозливі тренди зростання ризику та прогнозувати час досягнення критичних порогів, що підкреслює перспективи впровадження запропонованої моделі у адаптивні системи управління автономними суднами
Посилання
- Enhancing collision avoidance in mixed water-borne transport: Human-mimic navigation and decision-making by autonomous vessels / Song R., Papadimitriou E., Negenborn,R. R., Van Gelder P. Ocean Engineering. 2025. Vol. 322. Article 120443. DOI: https://doi.org/10.1016/j.oceaneng.2025.120443.
- Li P., Wang Y., Yang Z. Risk assessment of maritime autonomous surface ships collisions using an FTA-FBN model. Ocean Engineering. 2024. Vol. 309. Article 118444. DOI: https://doi.org/10.1016/j.oceaneng.2024.118444.
- Nonlinear model predictive control for path following of autonomous inland vessels in confined waterways / C. Zhang et al. Ocean Engineering. 2025. Vol. 334. Article 121592. DOI: https://doi.org/10.1016/j.oceaneng.2025.121592.
- Multi-scale collision risk assessment in restricted waters considering ship trajectory uncertainty / J. Du et al. Reliability Engineering & System Safety. 2025. Vol. 265. Article 111511. DOI: https://doi.org/10.1016/j.ress.2025.111511.
- Xue H., Lai Y., Sun K. Human-like constraint-adaptive model predictive control with risk-tunable control barrier functions for autonomous ships. Ocean Engineering. 2024. Vol. 308. Article 118219. DOI: https://doi.org/10.1016/j.oceaneng.2024.118219.
- Von Brandis A., Menges D., Rasheed A. Multi-Target Tracking for Autonomous Surface Vessels Using LiDAR and AIS Data Integration. Applied Ocean Research. 2024. Vol. 154. Article 104348. DOI: https://doi.org/10.1016/j.apor.2024.104348.
- Robust sliding mode model predictive control and thrust allocation methods for autonomous berthing of water-jet propulsion unmanned surface vehicles / Qi J., Liang W., Xie W., Peng Y. Ocean Engineering. 2025. Vol. 331. Article 121280. DOI: https://doi.org/10.1016/j.oceaneng.2025.121280.
- A dynamic-static combination risk analysis framework for berthing/unberthing operations of maritime autonomous surface ships considering temporal correlation / Luo X., Ling H., Xing M., Bai X. Reliability Engineering & System Safety. 2024. Vol. 245. Article 110015. DOI: https://doi.org/10.1016/j.ress.2024.110015.
- Navigation risk assessment for ocean-going ships in the north pacific ocean based on an improved dynamic Bayesian network model / Wang Y., Qian L., Hong M., Li D. Ocean Engineering. 2024. Vol. 315. Article 119804. DOI: https://doi.org/10.1016/j.oceaneng.2024.119804.
- Object detection for autonomous vehicles under adverse weather conditions / Z. Chen et al. Expert Systems With Applications. 2026. Vol. 296. Article 128994. DOI: https://doi.org/10.1016/j.eswa.2025.128994.
- An operational risk management approach for small fishing vessel / F. Obeng et al. Reliability Engineering & System Safety. 2024. Vol. 247. Article 110104. DOI: https://doi.org/10.1016/j.ress.2024.110104.
- Toward modeling emergency unmooring of manned and autonomous ships - A combined FRAM+HFACS-MA approach / J. Nasur et al. Safety Science. 2024. Vol. 181. Article 106676. DOI: https://doi.org/10.1016/j.ssci.2024.106676.
- Мельник О. М., Бичковський Ю. В. Сучасна методика оцінки рівню безпеки судна та шляхи його підвищення. Розвиток транспорту. 2021. № 2(9). С. 37-46. DOI: https://doi.org/10.33082/td.2021.2-9.03.
- Мельник О. М., Бичковський Ю. В. Врахування фактору стресу у системі забезпечення безпеки мореплавства. Вчені записки Таврійського національного університету імені В.І. Вернадського. Серія: Технічні науки. 2021. Т. 32(71), № 4. С. 260-264. DOI: https://doi.org/10.32838/2663-5941/2021.4/39.
- Огляд та перспективи використання сучасних систем курсовказання на морських суднах для забезпечення навігаційної безпеки / Мельник О. М., Щербина О. В., Корякін К. С., Бурлаченко Д. А. Наукові вісті Далівського університету. 2021. № 21. DOI: https://doi.org/10.33216/2222-3428-2021-21.
- Актуальні проблеми морської безпеки та сучасні шляхи забезпечення охорони судна / О. М. Мельник та ін. Комунальне господарство міст. 2021. № 6(166). С. 204-210. DOI: https://doi.org/10.33042/2522-1809-2021-6-166-204-210.
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Журнал "Вісник Приазовського державного технічного університету. Серія: Технічні науки" видається під ліцензією СС-BY (Ліцензія «Із зазначенням авторства»).
Дана ліцензія дозволяє поширювати, редагувати, поправляти і брати твір за основу для похідних навіть на комерційній основі із зазначенням авторства. Це найзручніша з усіх пропонованих ліцензій. Рекомендується для максимального поширення і використання неліцензійних матеріалів.

Автори, які публікуються в цьому журналі, погоджуються з наступними умовами:
1. Автори залишають за собою право на авторство своєї роботи та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons Attribution License, яка дозволяє іншим особам вільно розповсюджувати опубліковану роботу з обов'язковим посиланням на авторів оригінальної роботи та першу публікацію роботи в цьому журналі.
2. Автори мають право укладати самостійні додаткові угоди, які стосуються неексклюзивного поширення роботи в тому вигляді, в якому вона була опублікована цим журналом (наприклад, розміщувати роботу в електронному сховищі установи або публікувати у складі монографії), за умови збереження посилання на першу публікацію роботи в цьому журналі.





