Аналіз сучасних підходів до ідентифікації динамічних характеристик маневрування суден
DOI:
https://doi.org/10.31498/2225-6733.52.2025.351125Ключові слова:
маневрування суден, динамічні характеристики, ідентифікація параметрів, управління рухом судна, математичне моделювання, адаптивні методи, підходи орієнтовані на дані, гібридні моделіАнотація
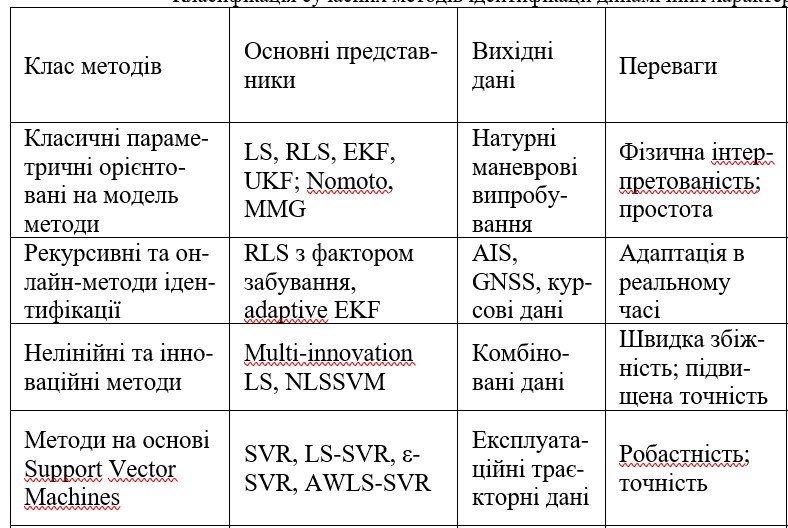
У статті виконано комплексний огляд і систематизацію сучасних методів ідентифікації динамічних характеристик маневрування суден. Проаналізовано класичні орієнтовані на модель параметричні підходи, засновані на використанні математичних моделей типу Nomoto та MMG у поєднанні з методами найменших квадратів і фільтрами Калмана, а також рекурсивні й онлайн-алгоритми, орієнтовані на адаптацію параметрів у реальному часі. Окрему увагу приділено нелінійним, інноваційним і орієнтованим на дані методам, зокрема підходам на основі регресії опорних векторів, регресії гаусівського процесу та нейронних мереж, які дозволяють враховувати складні нелінійні ефекти та змінні умови експлуатації. Проведено класифікацію розглянутих методів за типами математичних моделей, алгоритмами ідентифікації, джерелами вихідних даних і рівнем придатності для використання в системах управління рухом суден. Показано, що традиційні орієнтовані на модель підходи характеризуються фізичною інтерпретованістю параметрів, проте мають обмежену точність і адаптивність у реальних умовах плавання. Сучасні орієнтовані на дані та інтелектуальні методи, навпаки, забезпечують підвищену точність і здатність до адаптації, однак супроводжуються зростанням обчислювальної складності та проблемами інтерпретованості результатів. На основі проведеного аналізу обґрунтовано доцільність розвитку гібридних (grey-box) підходів, які поєднують фізично обґрунтовані математичні моделі з адаптивними орієнтованими на дані алгоритмами. Зазначено, що такі підходи є перспективними для інтеграції в системи підтримки прийняття рішень, цифрові двійники суден та інтелектуальні навігаційні комплекси. Отримані результати створюють наукові передумови для подальших досліджень, спрямованих на розроблення адаптивних методів ідентифікації динамічних характеристик маневрування суден з використанням експлуатаційних навігаційних даних та підвищення ефективності управління рухом у реальних умовах експлуатації
Посилання
- Parameter Identification of Ship Maneuvering Models Using Recursive Least Square Method Based on Support Vector Machines / Zhu M., Hahn A., Wen Y., Bolles A. The International Journal on Marine Navigation and Safety of Sea Transportation, The TransNav. 2017. Vol. 11(1). Pp. 23-29. DOI: https://doi.org/10.12716/1001.11.01.01.
- Іванов С. В., Тєут В. М., Олійник П. Б. Ідентифікація параметрів математичної моделі судна для забезпечення автоматичного керування в умовах переходу. Eastern-European Journal of Enterprise Technologies. 2015. Т. 3, no. 4(75). С. 32-36. DOI: https://doi.org/10.15587/1729-4061.2015.42139.
- Song C., Zhang X., Zhang G. Nonlinear Identification for 4-DOF Ship Maneuvering Modeling via Full-Scale Trial Data. IEEE Transactions on Industrial Electronics. 2022. Vol. 69(2). Pp. 1829-1835. DOI: https://doi.org/10.1109/TIE.2021.3062255.
- Ship Steering Adaptive CGS Control Based on EKF Identification Method / Guan W., Peng H., Zhang X., Sun H. Journal of Marine Science and Engineering. 2022. Vol. 10(2). Article 294. DOI: https://doi.org/10.3390/jmse10020294.
- Nguyen H. D. Recursive identification of ship manoeuvring dynamics and hydrodynamics. ANZIAM Journal. 2008. Vol. 49. Pp. 717-732. DOI: https://doi.org/10.21914/anziamj.v49i0.358.
- Online Identification Method for Motion Model Parameters of Unmanned Surface Vehicle / X. Sun et al. 37th Chinese Control and Decision Conference (CCDC), Xiamen, China, 16-19 May 2025. Pp. 1681-1685. DOI: https://doi.org/10.1109/CCDC65474.2025.11090779.
- Bai W., Ren J., Li T. Multi-Innovation Gradient Iterative Locally Weighted Learning Identification for A Nonlinear Ship Maneuvering System. China Ocean Engineering. 2018. Vol. 32(3). Pp. 288-300. DOI: https://doi.org/10.1007/s13344-018-0030-0.
- Ship Manoeuvring Model Parameter Identification Using Intelligent Machine Learning Method and the Beetle Antennae Search Algorithm / C. Chen et al. ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, UK, 9-14 June 2019. Article V07BT06A028. DOI: https://doi.org/10.1115/OMAE2019-95565.
- A Constrained Least Squares Algorithm for Maneuvering Dynamics Identification of Marine Crafts / Y. Zhong et al. 42nd Chinese Control Conference (CCC), Tianjin, China, 24-26 July 2023. Pp. 1379-1384. DOI: https://doi.org/10.23919/CCC58697.2023.10240564.
- System Identification of Abkowitz Model for Ship Maneuvering Motion Based on ε-Support Vector Regression / B. Liu et al. ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, UK, 9-14 June 2019. Article V07AT06A067. DOI: https://doi.org/10.1115/OMAE2019-96699.
- Identification and Prediction of Ship Maneuvering Motion Based on a Gaussian Process with Uncertainty Propagation / Xue Y., Liu Y., Xue G., Chen G. Journal of Marine Science and Engineering. 2021. Vol. 9(8). Article 804. DOI: https://doi.org/10.3390/jmse9080804.
- Zhang Z., Ren J. Locally Weighted Non-Parametric Modeling of Ship Maneuvering Motion Based on Sparse Gaussian Process. Journal of Marine Science and Engineering. 2021. Vol. 9(6). Article 606. DOI: https://doi.org/10.3390/jmse9060606.
- Identification of USV Maneuvering Model Based on Multi-Output Gaussian Process Regression / Z. Hong et al. 2023 China Automation Congress (CAC), Chongqing, China, 17-19 November 2023. Pp. 6300-6305. DOI: https://doi.org/10.1109/CAC59555.2023.10451338.
- Dynamic system identification of underactuated ship dynamics based on Gaussian process regression / Zhang P., Liu J., Xie L., Li S. 2021 6th International Conference on Transportation Information and Safety (ICTIS), Wuhan,China, 22-24 October 2021. Pp. 954–960. DOI: https://doi.org/10.1109/ICTIS54573.2021.9798415.
- Identification modeling and prediction of ship maneuvering motion based on LSTM deep neural network / Y. Jiang et al. Journal of Marine Science and Technology. 2022. Vol. 27(1). Pp. 125-137. DOI: https://doi.org/10.1007/s00773-021-00819-9.
- Self-organizing data-driven prediction model of ship maneuvering fast-dynamics / N. Wang et al. Ocean Engineering. 2023. Vol. 288. Article 115989. DOI: https://doi.org/10.1016/j.oceaneng.2023.115989.
- Li S. Y., Xiang J., Xia G. H. Enhancing Ship Maneuvering Models through Hybrid Integration of Data-Driven Velocity Calibrator for Improved Performance. OCEANS 2024 – Singapore, Singapore, Singapore, 15-18 April 2024. Pp. 1-6. DOI: https://doi.org/10.1109/OCEANS51537.2024.10682323.
- Incorporating Approximate Dynamics Into Data-Driven Calibrator: A Representative Model for Ship Maneuvering Prediction / T. Wang et al. IEEE Transactions on Industrial Informatics. 2022. Vol. 18(3). Pp. 1781-1789. DOI: https://doi.org/10.1109/TII.2021.3088404.
- Multi-objective optimal input design for grey-box identification modelling of ship manoeuvring motion / L. Jiang et al. Ships and Offshore Structures. 2025. Vol. 20(2). Pp. 178-187. DOI: https://doi.org/10.1080/17445302.2024.2335452.
- Online prediction of ship maneuvering motions based on adaptive weighted ensemble learning under dynamic changes / Y. Yu et al. Engineering Applications of Computational Fluid Mechanics. 2024. Vol. 18(1). Article 2341922. DOI: https://doi.org/10.1080/19942060.2024.2341922.
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Журнал "Вісник Приазовського державного технічного університету. Серія: Технічні науки" видається під ліцензією СС-BY (Ліцензія «Із зазначенням авторства»).
Дана ліцензія дозволяє поширювати, редагувати, поправляти і брати твір за основу для похідних навіть на комерційній основі із зазначенням авторства. Це найзручніша з усіх пропонованих ліцензій. Рекомендується для максимального поширення і використання неліцензійних матеріалів.

Автори, які публікуються в цьому журналі, погоджуються з наступними умовами:
1. Автори залишають за собою право на авторство своєї роботи та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons Attribution License, яка дозволяє іншим особам вільно розповсюджувати опубліковану роботу з обов'язковим посиланням на авторів оригінальної роботи та першу публікацію роботи в цьому журналі.
2. Автори мають право укладати самостійні додаткові угоди, які стосуються неексклюзивного поширення роботи в тому вигляді, в якому вона була опублікована цим журналом (наприклад, розміщувати роботу в електронному сховищі установи або публікувати у складі монографії), за умови збереження посилання на першу публікацію роботи в цьому журналі.





