Development of autonomous vehicle navigation in unstructured environments: the impact of implementing a path planning algorithm on autonomous vehicles
DOI:
https://doi.org/10.15587/1729-4061.2025.323746Keywords:
ant colony optimization, artificial potential fields, A*, autonomous vehicles, path planningAbstract
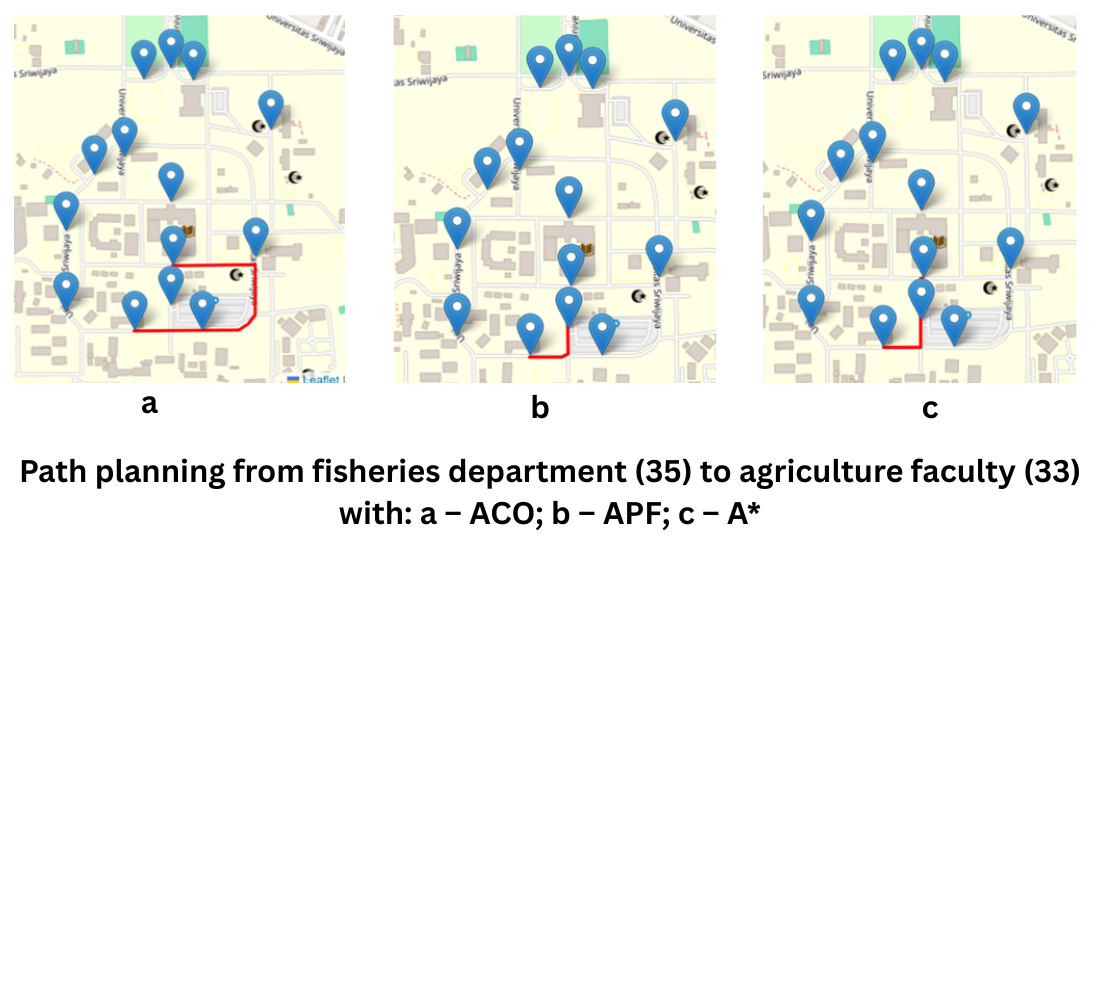
The path planning system has been identified as an efficient method for optimizing navigation, reducing energy consumption, and ensuring safety in autonomous vehicles. Various studies have been conducted on algorithms such as Ant Colony Optimization (ACO), Artificial Potential Field (APF), and the A* algorithm. However, only a few studies have evaluated the effectiveness of each of these algorithms, especially for autonomous vehicles implemented in real-road scenarios. Thus, this study aims to assess the effectiveness of ACO, APF, and A* in identifying the optimal path, computational efficiency, and execution time for generating routes in an autonomous vehicle. Experiments were conducted using road coordinate data from the Universitas Sriwijaya campus, representing suburban road conditions in Indonesia. The results showed that the A* algorithm excels in finding optimal routes, with an average path length of 0.48 km and a 100 % success rate. This is due to its heuristic, Euclidean-based approach. Meanwhile, ACO achieved an average path length of 0.57 km with a 100 % success rate, whereas APF achieved 0.36 km with a 41 % success rate. ACO demonstrated varied route performance due to its probabilistic nature, while APF generated paths more quickly but often failed in complex environments due to local minimum traps. Regarding computation time, an increase in distance leads to a longer route formation time for APF and A*, respectively. However, in ACO, route distance does not directly determine the time required for route formation, as the algorithm incorporates a probability factor in the process. This study confirms that A* is more optimal for global path planning, whereas APF is better suited for local path planning. These findings provide valuable insights into the development of autonomous vehicle navigation in unstructured environments
References
- Alaliyat, S., Oucheikh, R., Hameed, I. (2019). Path Planning in Dynamic Environment Using Particle Swarm Optimization Algorithm. 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), 1–5. https://doi.org/10.1109/icmsao.2019.8880434
- Sari, D. W., Dwijayanti, S., Suprapto, B. Y. (2023). Path Planning for an Autonomous Vehicle based on the Ant Colony Algorithm: A Review. 2023 International Workshop on Artificial Intelligence and Image Processing (IWAIIP), 57–62. https://doi.org/10.1109/iwaiip58158.2023.10462744
- Jin, Q., Tang, C., Cai, W. (2022). Research on Dynamic Path Planning Based on the Fusion Algorithm of Improved Ant Colony Optimization and Rolling Window Method. IEEE Access, 10, 28322–28332. https://doi.org/10.1109/access.2021.3064831
- Chen, Y., Luo, W., Wang, M., Su, Y., Zhang, H. (2022). UUV 3D Path Planning Based on PSO-ACO Fusion Algorithm. 2022 37th Youth Academic Annual Conference of Chinese Association of Automation (YAC), 599–604. https://doi.org/10.1109/yac57282.2022.10023579
- Qin, H., Shao, S., Wang, T., Yu, X., Jiang, Y., Cao, Z. (2023). Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones, 7 (3), 211. https://doi.org/10.3390/drones7030211
- Zhang, H., Lin, W., Chen, A. (2018). Path Planning for the Mobile Robot: A Review. Symmetry, 10 (10), 450. https://doi.org/10.3390/sym10100450
- Tao, Y., Gao, H., Ren, F., Chen, C., Wang, T., Xiong, H., Jiang, S. (2021). A Mobile Service Robot Global Path Planning Method Based on Ant Colony Optimization and Fuzzy Control. Applied Sciences, 11 (8), 3605. https://doi.org/10.3390/app11083605
- Yu, X., Chen, W.-N., Gu, T., Yuan, H., Zhang, H., Zhang, J. (2019). ACO-A*: Ant Colony Optimization Plus A* for 3-D Traveling in Environments With Dense Obstacles. IEEE Transactions on Evolutionary Computation, 23 (4), 617–631. https://doi.org/10.1109/tevc.2018.2878221
- Tang, B., Zhu, Z., Luo, J. (2016). Hybridizing Particle Swarm Optimization and Differential Evolution for the Mobile Robot Global Path Planning. International Journal of Advanced Robotic Systems, 13 (3). https://doi.org/10.5772/63812
- Shi, K., Huang, L., Jiang, D., Sun, Y., Tong, X., Xie, Y., Fang, Z. (2022). Path Planning Optimization of Intelligent Vehicle Based on Improved Genetic and Ant Colony Hybrid Algorithm. Frontiers in Bioengineering and Biotechnology, 10. https://doi.org/10.3389/fbioe.2022.905983
- Zhang, J., Wu, J., Shen, X., Li, Y. (2021). Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. International Journal of Advanced Robotic Systems, 18 (5). https://doi.org/10.1177/17298814211042730
- Orozco-Rosas, U., Montiel, O., Sepúlveda, R. (2019). Mobile robot path planning using membrane evolutionary artificial potential field. Applied Soft Computing, 77, 236–251. https://doi.org/10.1016/j.asoc.2019.01.036
- Park, C., Kee, S.-C. (2021). Online Local Path Planning on the Campus Environment for Autonomous Driving Considering Road Constraints and Multiple Obstacles. Applied Sciences, 11 (9), 3909. https://doi.org/10.3390/app11093909
- Szczepanski, R., Bereit, A., Tarczewski, T. (2021). Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies, 14 (20), 6642. https://doi.org/10.3390/en14206642
- Fu, J., Lv, T., Li, B. (2022). Underwater Submarine Path Planning Based on Artificial Potential Field Ant Colony Algorithm and Velocity Obstacle Method. Sensors, 22 (10), 3652. https://doi.org/10.3390/s22103652
- I Hamad, I. I., Hasan, M. S. (2020). A Review: On using ACO Based Hybrid Algorithms for Path Planning of Multi-Mobile Robotics. International Journal of Interactive Mobile Technologies (IJIM), 14 (18), 145. https://doi.org/10.3991/ijim.v14i18.16371
- Che, G., Liu, L., Yu, Z. (2019). An improved ant colony optimization algorithm based on particle swarm optimization algorithm for path planning of autonomous underwater vehicle. Journal of Ambient Intelligence and Humanized Computing, 11 (8), 3349–3354. https://doi.org/10.1007/s12652-019-01531-8
- Ou, J., Wang, M. (2019). Path Planning for Omnidirectional Wheeled Mobile Robot by Improved Ant Colony Optimization. 2019 Chinese Control Conference (CCC), 2668–2673. https://doi.org/10.23919/chicc.2019.8866228
- Li, X., Li, Q., Zhang, J. (2022). Research on global path planning of unmanned vehicles based on improved ant colony algorithm in the complex road environment. Measurement and Control, 55 (9-10), 945–959. https://doi.org/10.1177/00202940221118132
- Fidanova, S. (2021). Ant Colony Optimization and Applications. In Studies in Computational Intelligence. Springer International Publishing. https://doi.org/10.1007/978-3-030-67380-2
- Zhang, Z., Chen, S., Li, Y., Wang, L., Ren, R., Xu, L. et al. (2022). Local Path Planning of Unmanned Underwater Vehicle Based on Improved APF and Rolling Window Method. 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), 542–549. https://doi.org/10.1109/iccsi55536.2022.9970658
- Chen, G., Liu, J. (2019). Mobile Robot Path Planning Using Ant Colony Algorithm and Improved Potential Field Method. Computational Intelligence and Neuroscience, 2019, 1–10. https://doi.org/10.1155/2019/1932812
- Yang, R., Cheng, L. (2019). Path Planning of Restaurant Service Robot Based on A-star Algorithms with Updated Weights. 2019 12th International Symposium on Computational Intelligence and Design (ISCID), 292–295. https://doi.org/10.1109/iscid.2019.00074
- Ju, C., Luo, Q., Yan, X. (2020). Path Planning Using an Improved A-star Algorithm. 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), 23–26. https://doi.org/10.1109/phm-jinan48558.2020.00012
- Suprapto, B. Y., Jonathan, J., Dwijayanti, S. (2023). Implementation of the A* Algorithm for Determining the Best Route for an Autonomous Electric Vehicle. 2023 International Workshop on Artificial Intelligence and Image Processing (IWAIIP), 304–308. https://doi.org/10.1109/iwaiip58158.2023.10462790
- Sun, Y., Fang, M., Su, Y. (2021). AGV Path Planning based on Improved Dijkstra Algorithm. Journal of Physics: Conference Series, 1746 (1), 012052. https://doi.org/10.1088/1742-6596/1746/1/012052
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Desi Windi Sari, Suci Dwijayanti, Bhakti Yudho Suprapto

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






