Розробка автономної навігації в неструктурованому середовищі: вплив впровадження алгоритму планування шляху на автономному транспортному засобі
DOI:
https://doi.org/10.15587/1729-4061.2025.323746Ключові слова:
оптимізація мурашиної колонії, штучні потенційні поля, А*, автономні транспортні засоби, планування шляхуАнотація
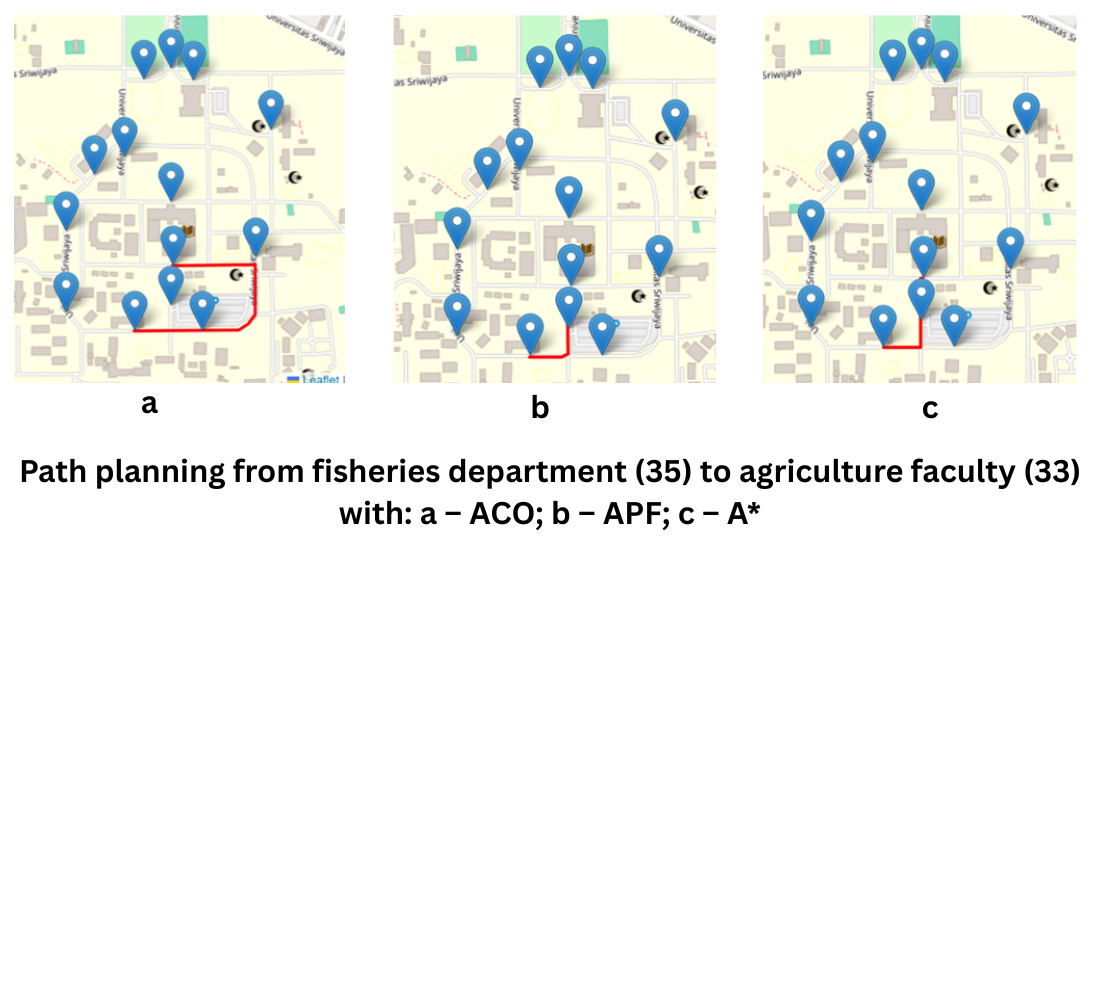
Система планування шляху була визначена як ефективний метод для оптимізації навігації, зниження споживання енергії та забезпечення безпеки в автономних транспортних засобах. Були проведені різні дослідження таких алгоритмів, як оптимізація мурашиної колонії (ОМК), штучне потенційне поле (ШПП) і алгоритм A*. Однак лише кілька досліджень оцінили ефективність кожного з цих алгоритмів, особливо для автономних транспортних засобів, реалізованих у сценаріях реальної дороги. Таким чином, це дослідження спрямоване на оцінку ефективності ОМК, ШПП і A* у визначенні оптимального шляху, обчислювальної ефективності та часу виконання для створення маршрутів в автономному транспортному засобі. Експерименти проводилися з використанням даних про координати доріг із кампусу Universitas Sriwijaya, які відображали умови приміських доріг в Індонезії. Результати показали, що алгоритм A* чудово підходить для пошуку оптимальних маршрутів із середньою довжиною шляху 0,48 км і 100 % успіхом. Це пов’язано з його евристичним, евклідовим підходом. Водночас ОМК досяг середньої довжини шляху 0,57 км із 100 % успіхом, тоді як ШПП досяг 0,36 км із 41 % успіхом. ОМК продемонстрував різноманітну продуктивність маршруту завдяки своїй ймовірнісній природі, тоді як ШПП генерував шляхи швидше, але часто не вдавався в складних середовищах через локальні мінімальні пастки. Що стосується часу обчислення, збільшення відстані призводить до довшого часу формування маршруту для ШПП і A* відповідно. Однак у ОМК відстань маршруту безпосередньо не визначає час, необхідний для формування маршруту, оскільки алгоритм включає в процес фактор імовірності. Це дослідження підтверджує, що A* є більш підходящим для глобального планування шляху, тоді як ШПП краще підходить для локального планування шляху. Ці висновки дають цінну інформацію про розвиток автономної навігації транспортних засобів у неструктурованих середовищах
Посилання
- Alaliyat, S., Oucheikh, R., Hameed, I. (2019). Path Planning in Dynamic Environment Using Particle Swarm Optimization Algorithm. 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), 1–5. https://doi.org/10.1109/icmsao.2019.8880434
- Sari, D. W., Dwijayanti, S., Suprapto, B. Y. (2023). Path Planning for an Autonomous Vehicle based on the Ant Colony Algorithm: A Review. 2023 International Workshop on Artificial Intelligence and Image Processing (IWAIIP), 57–62. https://doi.org/10.1109/iwaiip58158.2023.10462744
- Jin, Q., Tang, C., Cai, W. (2022). Research on Dynamic Path Planning Based on the Fusion Algorithm of Improved Ant Colony Optimization and Rolling Window Method. IEEE Access, 10, 28322–28332. https://doi.org/10.1109/access.2021.3064831
- Chen, Y., Luo, W., Wang, M., Su, Y., Zhang, H. (2022). UUV 3D Path Planning Based on PSO-ACO Fusion Algorithm. 2022 37th Youth Academic Annual Conference of Chinese Association of Automation (YAC), 599–604. https://doi.org/10.1109/yac57282.2022.10023579
- Qin, H., Shao, S., Wang, T., Yu, X., Jiang, Y., Cao, Z. (2023). Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones, 7 (3), 211. https://doi.org/10.3390/drones7030211
- Zhang, H., Lin, W., Chen, A. (2018). Path Planning for the Mobile Robot: A Review. Symmetry, 10 (10), 450. https://doi.org/10.3390/sym10100450
- Tao, Y., Gao, H., Ren, F., Chen, C., Wang, T., Xiong, H., Jiang, S. (2021). A Mobile Service Robot Global Path Planning Method Based on Ant Colony Optimization and Fuzzy Control. Applied Sciences, 11 (8), 3605. https://doi.org/10.3390/app11083605
- Yu, X., Chen, W.-N., Gu, T., Yuan, H., Zhang, H., Zhang, J. (2019). ACO-A*: Ant Colony Optimization Plus A* for 3-D Traveling in Environments With Dense Obstacles. IEEE Transactions on Evolutionary Computation, 23 (4), 617–631. https://doi.org/10.1109/tevc.2018.2878221
- Tang, B., Zhu, Z., Luo, J. (2016). Hybridizing Particle Swarm Optimization and Differential Evolution for the Mobile Robot Global Path Planning. International Journal of Advanced Robotic Systems, 13 (3). https://doi.org/10.5772/63812
- Shi, K., Huang, L., Jiang, D., Sun, Y., Tong, X., Xie, Y., Fang, Z. (2022). Path Planning Optimization of Intelligent Vehicle Based on Improved Genetic and Ant Colony Hybrid Algorithm. Frontiers in Bioengineering and Biotechnology, 10. https://doi.org/10.3389/fbioe.2022.905983
- Zhang, J., Wu, J., Shen, X., Li, Y. (2021). Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. International Journal of Advanced Robotic Systems, 18 (5). https://doi.org/10.1177/17298814211042730
- Orozco-Rosas, U., Montiel, O., Sepúlveda, R. (2019). Mobile robot path planning using membrane evolutionary artificial potential field. Applied Soft Computing, 77, 236–251. https://doi.org/10.1016/j.asoc.2019.01.036
- Park, C., Kee, S.-C. (2021). Online Local Path Planning on the Campus Environment for Autonomous Driving Considering Road Constraints and Multiple Obstacles. Applied Sciences, 11 (9), 3909. https://doi.org/10.3390/app11093909
- Szczepanski, R., Bereit, A., Tarczewski, T. (2021). Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies, 14 (20), 6642. https://doi.org/10.3390/en14206642
- Fu, J., Lv, T., Li, B. (2022). Underwater Submarine Path Planning Based on Artificial Potential Field Ant Colony Algorithm and Velocity Obstacle Method. Sensors, 22 (10), 3652. https://doi.org/10.3390/s22103652
- I Hamad, I. I., Hasan, M. S. (2020). A Review: On using ACO Based Hybrid Algorithms for Path Planning of Multi-Mobile Robotics. International Journal of Interactive Mobile Technologies (IJIM), 14 (18), 145. https://doi.org/10.3991/ijim.v14i18.16371
- Che, G., Liu, L., Yu, Z. (2019). An improved ant colony optimization algorithm based on particle swarm optimization algorithm for path planning of autonomous underwater vehicle. Journal of Ambient Intelligence and Humanized Computing, 11 (8), 3349–3354. https://doi.org/10.1007/s12652-019-01531-8
- Ou, J., Wang, M. (2019). Path Planning for Omnidirectional Wheeled Mobile Robot by Improved Ant Colony Optimization. 2019 Chinese Control Conference (CCC), 2668–2673. https://doi.org/10.23919/chicc.2019.8866228
- Li, X., Li, Q., Zhang, J. (2022). Research on global path planning of unmanned vehicles based on improved ant colony algorithm in the complex road environment. Measurement and Control, 55 (9-10), 945–959. https://doi.org/10.1177/00202940221118132
- Fidanova, S. (2021). Ant Colony Optimization and Applications. In Studies in Computational Intelligence. Springer International Publishing. https://doi.org/10.1007/978-3-030-67380-2
- Zhang, Z., Chen, S., Li, Y., Wang, L., Ren, R., Xu, L. et al. (2022). Local Path Planning of Unmanned Underwater Vehicle Based on Improved APF and Rolling Window Method. 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), 542–549. https://doi.org/10.1109/iccsi55536.2022.9970658
- Chen, G., Liu, J. (2019). Mobile Robot Path Planning Using Ant Colony Algorithm and Improved Potential Field Method. Computational Intelligence and Neuroscience, 2019, 1–10. https://doi.org/10.1155/2019/1932812
- Yang, R., Cheng, L. (2019). Path Planning of Restaurant Service Robot Based on A-star Algorithms with Updated Weights. 2019 12th International Symposium on Computational Intelligence and Design (ISCID), 292–295. https://doi.org/10.1109/iscid.2019.00074
- Ju, C., Luo, Q., Yan, X. (2020). Path Planning Using an Improved A-star Algorithm. 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), 23–26. https://doi.org/10.1109/phm-jinan48558.2020.00012
- Suprapto, B. Y., Jonathan, J., Dwijayanti, S. (2023). Implementation of the A* Algorithm for Determining the Best Route for an Autonomous Electric Vehicle. 2023 International Workshop on Artificial Intelligence and Image Processing (IWAIIP), 304–308. https://doi.org/10.1109/iwaiip58158.2023.10462790
- Sun, Y., Fang, M., Su, Y. (2021). AGV Path Planning based on Improved Dijkstra Algorithm. Journal of Physics: Conference Series, 1746 (1), 012052. https://doi.org/10.1088/1742-6596/1746/1/012052
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Desi Windi Sari, Suci Dwijayanti, Bhakti Yudho Suprapto

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







