Design and optimization of a Type-2 fuzzy logic-based lateral control system for enhancing trajectory stability in autonomous vehicles
DOI:
https://doi.org/10.15587/1729-4061.2025.326193Keywords:
autonomous vehicle, type-2 FLC, PID control, steering angle, membership function, maneuversAbstract
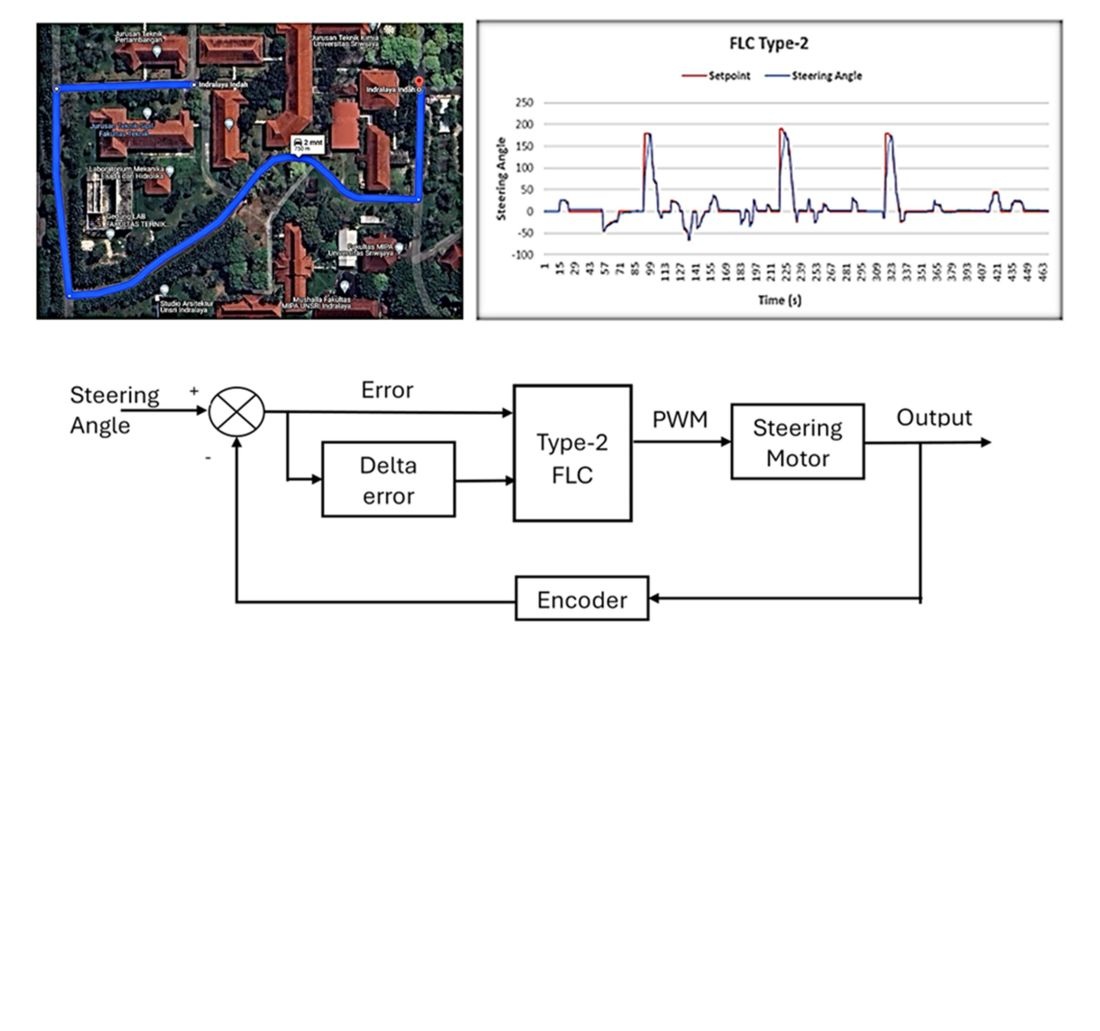
The focus of this study is the lateral control system of autonomous vehicles using steering control. The main objective is to ensure the vehicle consistently stays on the correct path. Existing methods remain limited, as they often assume ideal road conditions without obstacles or dynamic objects. To address this limitation, this study investigates steering angle control for autonomous vehicles in unstructured environments with potential obstacles. It specifically analyzes the application of a type-2 fuzzy logic controller (type-2 FLC) for steering control, using input values in the form of error and delta error. These values are calculated from the difference between the output generated and the steering angle measured by a pulse encoder mounted on the steering wheel. The type-2 FLC demonstrated high accuracy in obstacle avoidance tests: 1.54% (human), 4.28% (one car), 1.2% (two objects on the left), and 2.13% (two on the left, one on the right). In contrast, the PID controller produced higher error rates: 2.19%, 3.49%, 1.12%, and 3.49%, respectively. Full-route testing showed average forward-route errors of 8.87% for the type-2 FLC and 12.35% for the PID controller. On the return route, the type-2 FLC recorded a 4.52% error, while the PID controller showed 7.57%. Overall, the type-2 FLC achieved lower error rates and better accuracy than the PID controller, particularly in dynamic conditions. These results highlight the effectiveness of the type-2 FLC in enhancing autonomous vehicle performance and steering accuracy. Its low error values indicate superior path-tracking capabilities, effectively addressing the research objective
References
- Hussain, R., Zeadally, S. (2019). Autonomous Cars: Research Results, Issues, and Future Challenges. IEEE Communications Surveys & Tutorials, 21 (2), 1275–1313. https://doi.org/10.1109/comst.2018.2869360
- Fagnant, D. J., Kockelman, K. (2015). Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Transportation Research Part A: Policy and Practice, 77, 167–181. https://doi.org/10.1016/j.tra.2015.04.003
- Daily, M., Medasani, S., Behringer, R., Trivedi, M. (2017). Self-Driving Cars. Computer, 50 (12), 18–23. https://doi.org/10.1109/mc.2017.4451204
- Yaqoob, I., Khan, L. U., Kazmi, S. M. A., Imran, M., Guizani, N., Hong, C. S. (2020). Autonomous Driving Cars in Smart Cities: Recent Advances, Requirements, and Challenges. IEEE Network, 34 (1), 174–181. https://doi.org/10.1109/mnet.2019.1900120
- Parekh, D., Poddar, N., Rajpurkar, A., Chahal, M., Kumar, N., Joshi, G. P., Cho, W. (2022). A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics, 11 (14), 2162. https://doi.org/10.3390/electronics11142162
- Kuutti, S., Fallah, S., Katsaros, K., Dianati, M., Mccullough, F., Mouzakitis, A. (2018). A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications. IEEE Internet of Things Journal, 5 (2), 829–846. https://doi.org/10.1109/jiot.2018.2812300
- Hossain, T., Habibullah, H., Islam, R. (2022). Steering and Speed Control System Design for Autonomous Vehicles by Developing an Optimal Hybrid Controller to Track Reference Trajectory. Machines, 10 (6), 420. https://doi.org/10.3390/machines10060420
- Kebbati, Y., Ait‐Oufroukh, N., Ichalal, D., Vigneron, V. (2022). Lateral control for autonomous wheeled vehicles: A technical review. Asian Journal of Control, 25 (4), 2539–2563. https://doi.org/10.1002/asjc.2980
- Filho, C. M., Wolf, D. F., Grassi, V., Osorio, F. S. (2014). Longitudinal and lateral control for autonomous ground vehicles. 2014 IEEE Intelligent Vehicles Symposium Proceedings, 588–593. https://doi.org/10.1109/ivs.2014.6856431
- Chebly, A., Talj, R., Charara, A. (2017). Coupled Longitudinal and Lateral Control for an Autonomous Vehicle Dynamics Modeled Using a Robotics Formalism. IFAC-PapersOnLine, 50 (1), 12526–12532. https://doi.org/10.1016/j.ifacol.2017.08.2190
- Wang, J., Zhang, L., Huang, Y., Zhao, J., Bella, F. (2020). Safety of Autonomous Vehicles. Journal of Advanced Transportation, 2020, 1–13. https://doi.org/10.1155/2020/8867757
- Hasmitha, J., Shivani, M., Manasa, M., Chavan, A. (2020). Steering Control for Autonomous Vehicle using Model Predictive Controller. 2020 IEEE International Conference for Innovation in Technology (INOCON), 1–5. https://doi.org/10.1109/inocon50539.2020.9298205
- Jung, C., Kim, H., Son, Y., Lee, K., Yi, K. (2014). Parameter adaptive steering control for autonomous driving. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), 1462–1467. https://doi.org/10.1109/itsc.2014.6957892
- Yuan, T., Zhao, R. (2022). LQR-MPC-Based Trajectory-Tracking Controller of Autonomous Vehicle Subject to Coupling Effects and Driving State Uncertainties. Sensors, 22 (15), 5556. https://doi.org/10.3390/s22155556
- Emirler, M. T., Uygan, İ. M. C., Aksun Güvenç, B., Güvenç, L. (2014). Robust PID Steering Control in Parameter Space for Highly Automated Driving. International Journal of Vehicular Technology, 2014, 1–8. https://doi.org/10.1155/2014/259465
- Wang, X., Fu, M., Ma, H., Yang, Y. (2015). Lateral control of autonomous vehicles based on fuzzy logic. Control Engineering Practice, 34, 1–17. https://doi.org/10.1016/j.conengprac.2014.09.015
- de Silva, C. W. (1995). Applications of fuzzy logic in the control of robotic manipulators. Fuzzy Sets and Systems, 70 (2-3), 223–234. https://doi.org/10.1016/0165-0114(94)00219-w
- Kodagoda, K. R. S., Wijesoma, W. S., Teoh, E. K. (2002). Fuzzy speed and steering control of an AGV. IEEE Transactions on Control Systems Technology, 10 (1), 112–120. https://doi.org/10.1109/87.974344
- Liang, Q., Mendel, J. M. (2000). Interval type-2 fuzzy logic systems: theory and design. IEEE Transactions on Fuzzy Systems, 8 (5), 535–550. https://doi.org/10.1109/91.873577
- Arifin, B., Suprapto, B. Y., Prasetyowati, S. A. D., Nawawi, Z. (2022). Steering Control in Electric Power Steering Autonomous Vehicle Using Type-2 Fuzzy Logic Control and PI Control. World Electric Vehicle Journal, 13 (3), 53. https://doi.org/10.3390/wevj13030053
- Carreon-Ortiz, H., Valdez, F., Castillo, O. (2023). Comparative Study of Type-1 and Interval Type-2 Fuzzy Logic Systems in Parameter Adaptation for the Fuzzy Discrete Mycorrhiza Optimization Algorithm. Mathematics, 11 (11), 2501. https://doi.org/10.3390/math11112501
- Rastelli, J. P., Peñas, M. S. (2015). Fuzzy logic steering control of autonomous vehicles inside roundabouts. Applied Soft Computing, 35, 662–669. https://doi.org/10.1016/j.asoc.2015.06.030
- Naranjo, J. E., Gonzalez, C., Garcia, R., de Pedro, T. (2008). Lane-Change Fuzzy Control in Autonomous Vehicles for the Overtaking Maneuver. IEEE Transactions on Intelligent Transportation Systems, 9 (3), 438–450. https://doi.org/10.1109/tits.2008.922880
- Ashraf, Z., Roy, M. L., Muhuri, P. K., Danish Lohani, Q. M. (2020). Interval type-2 fuzzy logic system based similarity evaluation for image steganography. Heliyon, 6 (5), e03771. https://doi.org/10.1016/j.heliyon.2020.e03771
- Ginarsa, I. M., Muljono, A. B., Nrartha, I. M. A., Zebua, O. (2018). Desain Power System Stabilizer Berbasis Fuzzy Tipe-2 untuk Perbaikan Stabilitas Mesin Tunggal. Jurnal Rekayasa Elektrika, 14 (1), 1–8. https://doi.org/10.17529/jre.v14i1.8464
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Bhakti Yudho Suprapto, Suci Dwijayanti, Muhammad Irvin Fadillah

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





