Devising a numerical method for estimating the positioning accuracy of aircraft by an information- communication network of optoelectronic stations
DOI:
https://doi.org/10.15587/1729-4061.2025.330922Keywords:
optoelectronic station, infocommunication network, aircraft, convex polyhedron, scattering ellipsoidAbstract
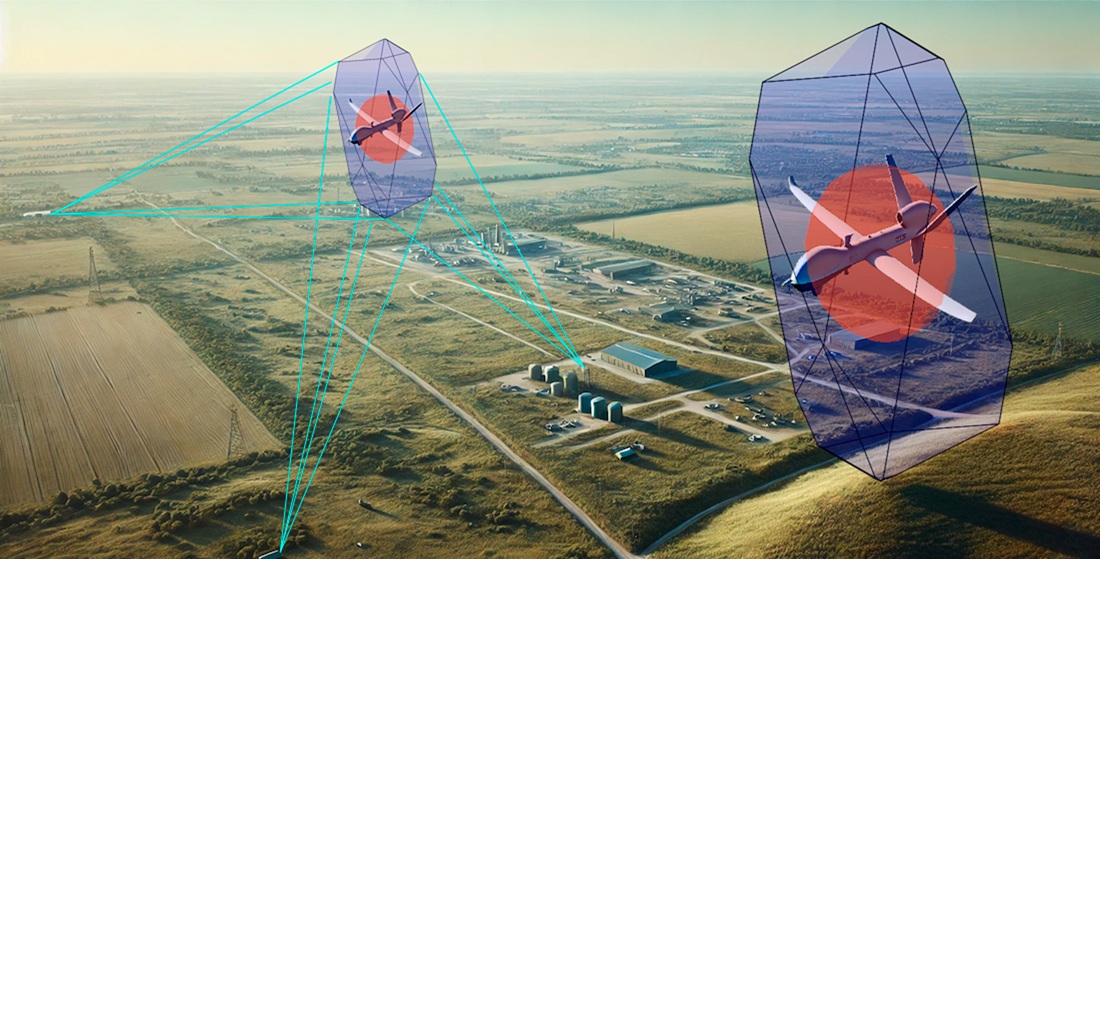
The object of this study is the accuracy of aircraft positioning for open and covert video surveillance by an infocommunication network of optical-electronic stations along the trajectories of their movement. The task addressed is numerical assessment of the accuracy of aircraft positioning in airspace. It is proposed to use a convex polyhedron as a universal assessment of the accuracy of aircraft positioning, in which, with a given probability, the aircraft is located. It is shown that the lower estimate of this probability depends on the a priori information on the statistical properties of the errors in the estimates of the coordinates of the aircraft location, and the scattering ellipsoid, which is currently the main form of assessing the accuracy of aircraft positioning in airspace, is a special case and is always located inside a convex polyhedron.
The results reported here include the following:
– simulation models of open and covert video surveillance by an infocommunication network of optoelectronic stations along the trajectories of aircraft movement;
– a numerical method for estimating the uncertainty region in the form of a convex polyhedron, in which, with a given probability, the aircraft is located;
– dependence of change in the shapes and boundaries of the convex polyhedron on the errors of video surveillance and the mutual spatial location of the aircraft and the network of optoelectronic stations;
– software implementation of methods for constructing and visualizing the shapes and boundaries of uncertainty regions in the form of convex polyhedrons and scattering ellipsoids.
It is shown that the aircraft is inside the convex polyhedron with the probability P ≥ 0.8889 for any distribution, P ≥ 0.9506 for a symmetric one and P ≥ 0.9973 for a normal distribution
References
- Bensky, A. (2016). Wireless Positioning Technologies and Applications. Artech House, 424.
- Lazzari, F., Buffi, A., Nepa, P., Lazzari, S. (2017). Numerical Investigation of an UWB Localization Technique for Unmanned Aerial Vehicles in Outdoor Scenarios. IEEE Sensors Journal, 17 (9), 2896–2903. https://doi.org/10.1109/jsen.2017.2684817
- Semenyuk, V., Kurmashev, I., Lupidi, A., Alyoshin, D., Kurmasheva, L., Cantelli-Forti, A. (2025). Advances in UAV detection: integrating multi-sensor systems and AI for enhanced accuracy and efficiency. International Journal of Critical Infrastructure Protection, 49, 100744. https://doi.org/10.1016/j.ijcip.2025.100744
- Saadaoui, F. Z., Cheggaga, N., Djabri, N. E. H. (2023). Multi-sensory system for UAVs detection using Bayesian inference. Applied Intelligence, 53 (24), 29818–29844. https://doi.org/10.1007/s10489-023-05027-z
- Stuckey, H., Escamilla, L., Garcia Carrillo, L. R., Tang, W. (2024). Real-Time Optical Localization and Tracking of UAV Using Ellipse Detection. IEEE Embedded Systems Letters, 16 (1), 1–4. https://doi.org/10.1109/les.2023.3234871
- Stuckey, H., Al-Radaideh, A., Escamilla, L., Sun, L., Carrillo, L. G., Tang, W. (2021). An Optical Spatial Localization System for Tracking Unmanned Aerial Vehicles Using a Single Dynamic Vision Sensor. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3093–3100. https://doi.org/10.1109/iros51168.2021.9636665
- Golyak, I. S., Anfimov, D. R., Golyak, I. S., Morozov, A. N., Tabalina, A. S., Fufurin, I. L. (2020). Methods for real-time optical location and tracking of unmanned aerial vehicles using digital neural networks. Automatic Target Recognition XXX, 50. https://doi.org/10.1117/12.2573209
- Nam, S. Y., Joshi, G. P. (2017). Unmanned aerial vehicle localization using distributed sensors. International Journal of Distributed Sensor Networks, 13 (9), 155014771773292. https://doi.org/10.1177/1550147717732920
- Hu, F., Wu, G. (2020). Distributed Error Correction of EKF Algorithm in Multi-Sensor Fusion Localization Model. IEEE Access, 8, 93211–93218. https://doi.org/10.1109/access.2020.2995170
- Sorbelli, F. B., Pinotti, C. M., Silvestri, S., Das, S. K. (2022). Measurement Errors in Range-Based Localization Algorithms for UAVs: Analysis and Experimentation. IEEE Transactions on Mobile Computing, 21 (4), 1291–1304. https://doi.org/10.1109/tmc.2020.3020584
- Vitiello, F., Causa, F., Opromolla, R., Fasano, G. (2024). Radar/visual fusion with fuse-before-track strategy for low altitude non-cooperative sense and avoid. Aerospace Science and Technology, 146, 108946. https://doi.org/10.1016/j.ast.2024.108946
- Bala, A., Muqaibel, A. H., Iqbal, N., Masood, M., Oliva, D., Abdullahi, M. (2025). Machine learning for drone detection from images: A review of techniques and challenges. Neurocomputing, 635, 129823. https://doi.org/10.1016/j.neucom.2025.129823
- Yan, X., Fu, T., Lin, H., Xuan, F., Huang, Y., Cao, Y. et al. (2023). UAV Detection and Tracking in Urban Environments Using Passive Sensors: A Survey. Applied Sciences, 13 (20), 11320. https://doi.org/10.3390/app132011320
- Svanstrom, F., Englund, C., Alonso-Fernandez, F. (2021). Real-Time Drone Detection and Tracking With Visible, Thermal and Acoustic Sensors. 2020 25th International Conference on Pattern Recognition (ICPR), 7265–7272. https://doi.org/10.1109/icpr48806.2021.9413241
- Tevyashev, A., Zemlyaniy, O., Shostko, I., Kostaryev, D., Paramonov, A. (2024). Devising an analytical method for estimating aircraft positioning accuracy by an infocommunication network of optoelectronic stations. Eastern-European Journal of Enterprise Technologies, 5 (9 (131)), 36–48. https://doi.org/10.15587/1729-4061.2024.312762
- Zekavat, S. A. (Reza), Buehrer, R. M. (Eds.) (2011). Handbook of Position Location. Wiley. https://doi.org/10.1002/9781118104750
- Khudov, H., Berezhnyi, A., Oleksenko, O., Maliuha, V., Balyk, I., Herda, M., Sobora, A. et al. (2023). Increasing of the accuracy of determining the coordinates of an aerial object in the two-position network of small-sized radars. Eastern-European Journal of Enterprise Technologies, 5 (9 (125)), 6–13. https://doi.org/10.15587/1729-4061.2023.289623
- Zheng, Q., Chen, J., Yang, R., Shan, Z. (2017). Research on airborne infrared location technology based on orthogonal multi-station angle measurement method. Infrared Physics & Technology, 86, 202–206. https://doi.org/10.1016/j.infrared.2017.08.019
- Putyatin, V. G., Dodonov, A. G. (2017). Ob odnoy zadache vysokotochnyh traektornyh izmereniy opticheskimi sredstvami. Reiestratsiya, zberihannia i obrobka danykh, 19 (2), 36–54. Available at: http://nbuv.gov.ua/UJRN/rzod_2017_19_2_6
- Dodonov, A. G., Putyatin, V. G. (2017). Nazemnye opticheskie, optiko-elektronnye i lazerno-televizionnye sredstva traektornyh izmereniy. Matematychni mashyny i systemy, 4, 30–56. Available at: http://dspace.nbuv.gov.ua/bitstream/handle/123456789/131985/02-Dodonov.pdf?sequence=1
- Tevjashev, A., Zemlyaniy, O., Shostko, I., Paramonov, A. (2024). Mathematical Models and Methods of Observation and High-Precision Assessment of the Trajectories Parameters of Aircraft Movement in the Infocommunication Network of Optoelectronic Stations. 2nd International Congress of Electrical and Computer Engineering, 295–309. https://doi.org/10.1007/978-3-031-52760-9_21
- Shostko, I., Tevyashev, A., Zemlyaniy, O., Tsibulnikov, D. (2023). Designing and testing a prototype of optical-electronic station for detecting and tracking moving objects in the air. Eastern-European Journal of Enterprise Technologies, 6 (5 (126)), 36–42. https://doi.org/10.15587/1729-4061.2023.295101
- Hofmann-Wellenhof, B., Lichtenegger, H., Collins, J. (2001). Global Positioning System. Springer Vienna. https://doi.org/10.1007/978-3-7091-6199-9
- Hahn, G. J., Shapiro, S. S. (1994). Statistical models in engineering. Wiley, 376.
- Precise Simulation. GEOMLib version 1.0. GitHub. Available at: https://github.com/precise-simulation/geomlib/releases/tag/1.0
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Andriy Tevyashev, Oleksii Haluza, Dmytro Kostaryev, Anton Paramonov, Nataliia Sizova

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





