Розробка чисельного методу оцінювання точності позиціонування літальних апаратів інфокомунікаційною мережею оптико-електронних станцій
DOI:
https://doi.org/10.15587/1729-4061.2025.330922Ключові слова:
оптико-електронна станція, інфокомунікаційна мережа, літальні апарати, опуклий багатогранник, еліпсоїд розсіюванняАнотація
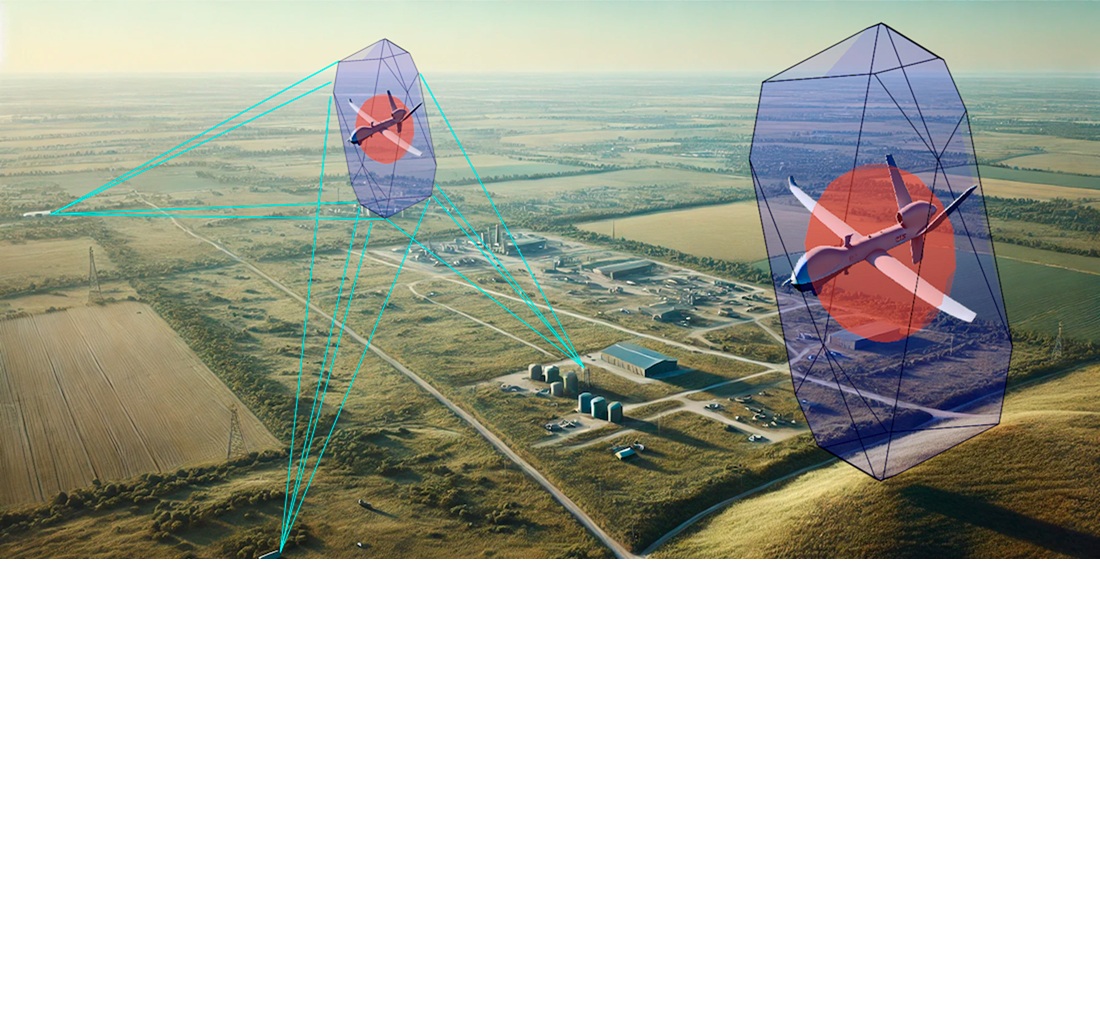
Об'єкт дослідження – точність позиціонування літальних апаратів для відкритого та прихованого відеоспостереження інфокомунікаційною мережею оптико-електронних станцій за траєкторіями їх руху. Вирішується проблема чисельного оцінювання точності позиціонування літальних апаратів у повітряному просторі. Запропоновано як універсальну оцінку точності позиціонування літальних апаратів використовувати опуклий, у якому, із заданою ймовірністю, знаходиться літальний апарат. Показано, що нижня оцінка цієї ймовірності залежить від апріорної інформації о статистичних властивостях помилок оцінок координат розташування літальних апаратів, а еліпсоїд розсіювання, який, на теперішній час, є основною формою оцінювання точності позиціювання літальних апаратів у повітряному просторі, є окремим випадком і завжди перебуває всередині опуклого багатогранника.
Отримані результати:
– імітаційні моделі відкритого та прихованого відеоспостереження інфокомунікаційною мережею оптико-електронних станцій за траєкторіями руху літальних апаратів;
– чисельний метод оцінювання області невизначеності у вигляді опуклого багатогранника, в якому, із заданою ймовірністю, знаходиться літальний апарат;
– залежність зміни форм та меж опуклого багатогранника від похибок відеоспостереження та взаємного просторового розташування літального апарату і мережі оптико-електронних станцій;
– програмна реалізація методів побудови та візуалізації форм і меж областей невизначеності у вигляді опуклих багатогранників та еліпсоїдів розсіювання.
Показано, що літальний апарат перебуває всередині опуклого багатогранника з імовірністю P ≥ 0,8889 для будь-якого розподілу, P≥0,9506 для симетричного і P≥0,9973 для нормального розподілу
Посилання
- Bensky, A. (2016). Wireless Positioning Technologies and Applications. Artech House, 424.
- Lazzari, F., Buffi, A., Nepa, P., Lazzari, S. (2017). Numerical Investigation of an UWB Localization Technique for Unmanned Aerial Vehicles in Outdoor Scenarios. IEEE Sensors Journal, 17 (9), 2896–2903. https://doi.org/10.1109/jsen.2017.2684817
- Semenyuk, V., Kurmashev, I., Lupidi, A., Alyoshin, D., Kurmasheva, L., Cantelli-Forti, A. (2025). Advances in UAV detection: integrating multi-sensor systems and AI for enhanced accuracy and efficiency. International Journal of Critical Infrastructure Protection, 49, 100744. https://doi.org/10.1016/j.ijcip.2025.100744
- Saadaoui, F. Z., Cheggaga, N., Djabri, N. E. H. (2023). Multi-sensory system for UAVs detection using Bayesian inference. Applied Intelligence, 53 (24), 29818–29844. https://doi.org/10.1007/s10489-023-05027-z
- Stuckey, H., Escamilla, L., Garcia Carrillo, L. R., Tang, W. (2024). Real-Time Optical Localization and Tracking of UAV Using Ellipse Detection. IEEE Embedded Systems Letters, 16 (1), 1–4. https://doi.org/10.1109/les.2023.3234871
- Stuckey, H., Al-Radaideh, A., Escamilla, L., Sun, L., Carrillo, L. G., Tang, W. (2021). An Optical Spatial Localization System for Tracking Unmanned Aerial Vehicles Using a Single Dynamic Vision Sensor. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3093–3100. https://doi.org/10.1109/iros51168.2021.9636665
- Golyak, I. S., Anfimov, D. R., Golyak, I. S., Morozov, A. N., Tabalina, A. S., Fufurin, I. L. (2020). Methods for real-time optical location and tracking of unmanned aerial vehicles using digital neural networks. Automatic Target Recognition XXX, 50. https://doi.org/10.1117/12.2573209
- Nam, S. Y., Joshi, G. P. (2017). Unmanned aerial vehicle localization using distributed sensors. International Journal of Distributed Sensor Networks, 13 (9), 155014771773292. https://doi.org/10.1177/1550147717732920
- Hu, F., Wu, G. (2020). Distributed Error Correction of EKF Algorithm in Multi-Sensor Fusion Localization Model. IEEE Access, 8, 93211–93218. https://doi.org/10.1109/access.2020.2995170
- Sorbelli, F. B., Pinotti, C. M., Silvestri, S., Das, S. K. (2022). Measurement Errors in Range-Based Localization Algorithms for UAVs: Analysis and Experimentation. IEEE Transactions on Mobile Computing, 21 (4), 1291–1304. https://doi.org/10.1109/tmc.2020.3020584
- Vitiello, F., Causa, F., Opromolla, R., Fasano, G. (2024). Radar/visual fusion with fuse-before-track strategy for low altitude non-cooperative sense and avoid. Aerospace Science and Technology, 146, 108946. https://doi.org/10.1016/j.ast.2024.108946
- Bala, A., Muqaibel, A. H., Iqbal, N., Masood, M., Oliva, D., Abdullahi, M. (2025). Machine learning for drone detection from images: A review of techniques and challenges. Neurocomputing, 635, 129823. https://doi.org/10.1016/j.neucom.2025.129823
- Yan, X., Fu, T., Lin, H., Xuan, F., Huang, Y., Cao, Y. et al. (2023). UAV Detection and Tracking in Urban Environments Using Passive Sensors: A Survey. Applied Sciences, 13 (20), 11320. https://doi.org/10.3390/app132011320
- Svanstrom, F., Englund, C., Alonso-Fernandez, F. (2021). Real-Time Drone Detection and Tracking With Visible, Thermal and Acoustic Sensors. 2020 25th International Conference on Pattern Recognition (ICPR), 7265–7272. https://doi.org/10.1109/icpr48806.2021.9413241
- Tevyashev, A., Zemlyaniy, O., Shostko, I., Kostaryev, D., Paramonov, A. (2024). Devising an analytical method for estimating aircraft positioning accuracy by an infocommunication network of optoelectronic stations. Eastern-European Journal of Enterprise Technologies, 5 (9 (131)), 36–48. https://doi.org/10.15587/1729-4061.2024.312762
- Zekavat, S. A. (Reza), Buehrer, R. M. (Eds.) (2011). Handbook of Position Location. Wiley. https://doi.org/10.1002/9781118104750
- Khudov, H., Berezhnyi, A., Oleksenko, O., Maliuha, V., Balyk, I., Herda, M., Sobora, A. et al. (2023). Increasing of the accuracy of determining the coordinates of an aerial object in the two-position network of small-sized radars. Eastern-European Journal of Enterprise Technologies, 5 (9 (125)), 6–13. https://doi.org/10.15587/1729-4061.2023.289623
- Zheng, Q., Chen, J., Yang, R., Shan, Z. (2017). Research on airborne infrared location technology based on orthogonal multi-station angle measurement method. Infrared Physics & Technology, 86, 202–206. https://doi.org/10.1016/j.infrared.2017.08.019
- Putyatin, V. G., Dodonov, A. G. (2017). Ob odnoy zadache vysokotochnyh traektornyh izmereniy opticheskimi sredstvami. Reiestratsiya, zberihannia i obrobka danykh, 19 (2), 36–54. Available at: http://nbuv.gov.ua/UJRN/rzod_2017_19_2_6
- Dodonov, A. G., Putyatin, V. G. (2017). Nazemnye opticheskie, optiko-elektronnye i lazerno-televizionnye sredstva traektornyh izmereniy. Matematychni mashyny i systemy, 4, 30–56. Available at: http://dspace.nbuv.gov.ua/bitstream/handle/123456789/131985/02-Dodonov.pdf?sequence=1
- Tevjashev, A., Zemlyaniy, O., Shostko, I., Paramonov, A. (2024). Mathematical Models and Methods of Observation and High-Precision Assessment of the Trajectories Parameters of Aircraft Movement in the Infocommunication Network of Optoelectronic Stations. 2nd International Congress of Electrical and Computer Engineering, 295–309. https://doi.org/10.1007/978-3-031-52760-9_21
- Shostko, I., Tevyashev, A., Zemlyaniy, O., Tsibulnikov, D. (2023). Designing and testing a prototype of optical-electronic station for detecting and tracking moving objects in the air. Eastern-European Journal of Enterprise Technologies, 6 (5 (126)), 36–42. https://doi.org/10.15587/1729-4061.2023.295101
- Hofmann-Wellenhof, B., Lichtenegger, H., Collins, J. (2001). Global Positioning System. Springer Vienna. https://doi.org/10.1007/978-3-7091-6199-9
- Hahn, G. J., Shapiro, S. S. (1994). Statistical models in engineering. Wiley, 376.
- Precise Simulation. GEOMLib version 1.0. GitHub. Available at: https://github.com/precise-simulation/geomlib/releases/tag/1.0
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Andriy Tevyashev, Oleksii Haluza, Dmytro Kostaryev, Anton Paramonov, Nataliia Sizova

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






