Розробка методу дискретного пошуку повітряного судна, яке зазнало лиха, із використанням відношення Блекуела-Блека-Кадана
DOI:
https://doi.org/10.15587/1729-4061.2025.331877Ключові слова:
відношення Блекуела-Блека-Кадана, дискретний пошук, об’єкт пошуку, пошуково-рятувальна операція, рівномірно-оптимальна стратегія пошукуАнотація
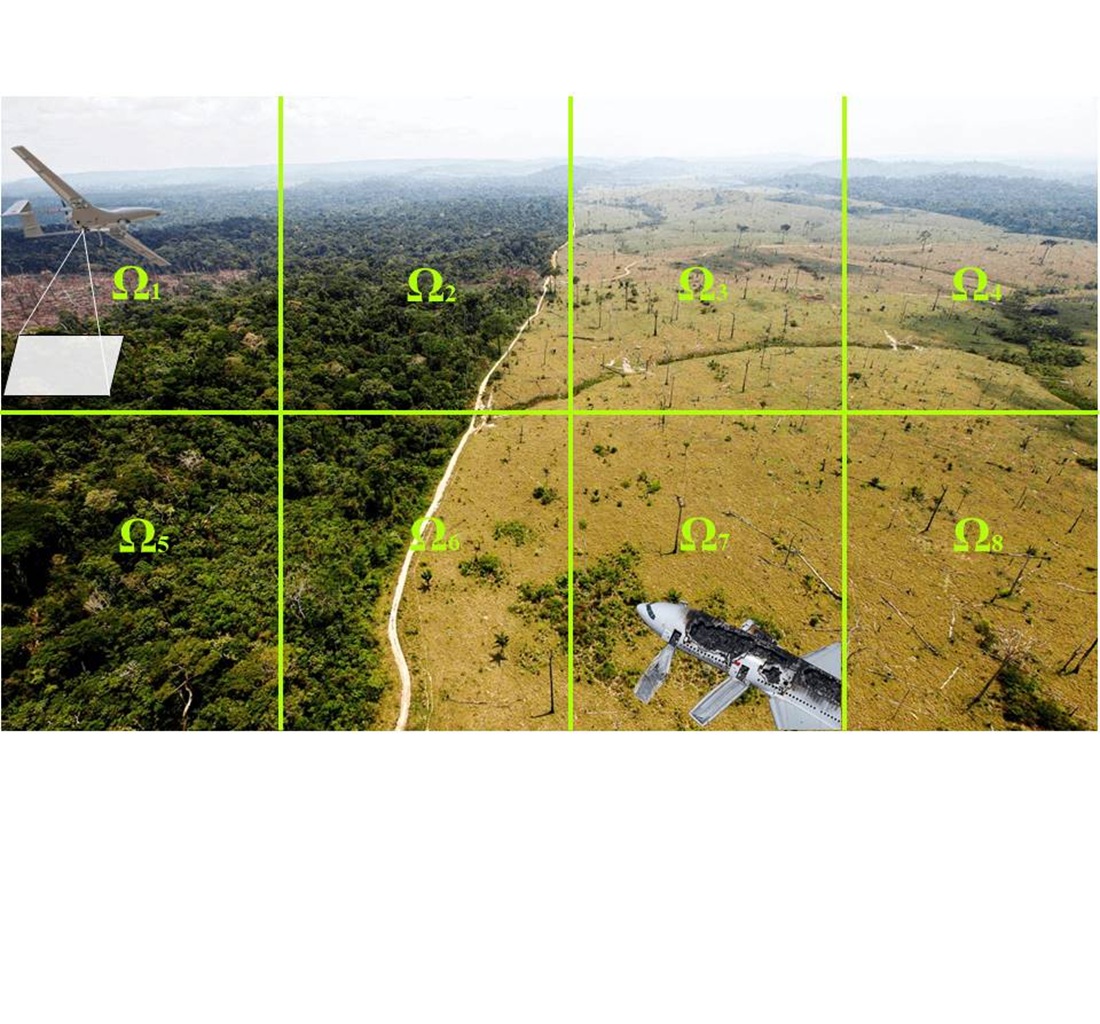
Об’єкт дослідження – процес пошуку повітряного судна, яке зазнало лиха пошуковими засобами. Основна гіпотеза дослідження полягає в тому, що використання рівномірно-оптимальної стратегії пошуку в дискретній зоні пошуку з урахуванням відношення Блекуела-Блека-Кадана дозволить мінімізувати середній час виявлення повітряного судна, яке зазнало лиха. Сформульовано оптимальне баєсівське правило, яке полягає у визначенні максимального значення відношення правдоподібності у поточному дискретному секторі пошуку та його порівняння з порогом. Введено клас рівномірно-оптимальних стратегій пошуку. Удосконалено метод дискретного пошуку повітряного судна, яке зазнало лиха, в якому на відміну від відомих:
– врахована апріорна імовірність знаходження об’єкту пошуку в секторі пошуку;
– розраховується імовірність того, що об’єкт пошуку буде виявлений при перегляді сектору пошуку;
– визначаються відношення Блекуела-Блека-Кадана;
– проводиться ранжування отриманих величин Блекуела-Блека-Кадана,
а послідовність обстеження секторів пошуку проводиться у відповідності із отриманим ранжуванням величин відношень Блекуела-Блека-Кадана.
Проведено оцінювання середнього часу до виявлення об’єкта пошуку. Встановлено, что при оптимізації пошуку повітряного судна, яке зазнало лиха, середній час пошуку обєкту пошуку зменшується на 12 %.
Обмеженням дослідження є спрощене уявлення про район пошуку, який представлений регулярною дискретною сіткою без урахування складного рельєфу або заборонених зон. Крім того, не враховано зовнішні фактори, такі як погодні умови, вітер, тощо, які можуть впливати на швидкість та маршрут руху засобу пошуку.
Недоліками удосконаленого методу є його застосування лише для випадку області пошуку дискретної структури
Посилання
- Flightradar24 registered a record number of planes in the air (2023). Mezha. Available at: https://mezha.media/en/2023/05/29/flightradar24-recorded-a-record-number-of-planes-in-the-air/
- Katastrofy viiskovykh litakiv u nezalezhniy Ukraini: khronika naibilshykh vtrat (2020). Novynarnia. Available at: https://novynarnia.com/2020/09/30/vijsko-aviakatastrofy/
- List Of Aircraft Losses During The Russian Invasion Of Ukraine (2022). Oryx. Available at: https://www.oryxspioenkop.com/2022/03/list-of-aircraft-losses-during-2022.html
- Echols, C. (2022). Recent string of deadly military crashes is no accident. Available at: https://responsiblestatecraft.org/2022/06/10/recent-string-of-deadly-military-crashes-is-no-accident/
- Parashchak, O., Kramer, N. (2025). Deadliest Aircraft Crashes and Worst Aviation Accident Statistics (1925-2025). Beinsure. Available at: https://beinsure.com/aircraft-crashes/
- Factual information safety investigation for MH370. Available at: https://www.mot.gov.my/my/Laporan%20MH%20370/Factual%20Information%20Safety%20Investigation%20For%20MH370.pdf
- French judges drop charges against Air France over 2009 Rio-Paris crash. France 24. Available at: https://www.france24.com/en/20190905-france-judges-charge-air-france-2009-A330-rio-paris-crash-af447-airbus
- Barabash, O. V., Dakhno, N. B., Shevchenko, H. V., Majsak, T. V. (2017). Dynamic models of decision support systems for controlling UAV by two-step variational-gradient method. 2017 IEEE 4th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), 108–111. https://doi.org/10.1109/apuavd.2017.8308787
- Barabash, O., Kyrianov, A. (2023). Development of control laws of unmanned aerial vehicles for performing group flight at the straight-line horizontal flight stage. Advanced Information Systems, 7 (4), 13–20. https://doi.org/10.20998/2522-9052.2023.4.02
- Bany Abdelnabi, A. A., Rabadi, G. (2024). Human Detection From Unmanned Aerial Vehicles’ Images for Search and Rescue Missions: A State-of-the-Art Review. IEEE Access, 12, 152009–152035. https://doi.org/10.1109/access.2024.3479988
- Quero, C. O., Martinez-Carranza, J. (2025). Unmanned aerial systems in search and rescue: A global perspective on current challenges and future applications. International Journal of Disaster Risk Reduction, 118, 105199. https://doi.org/10.1016/j.ijdrr.2025.105199
- Sambolek, S., Ivasic-Kos, M. (2021). Automatic Person Detection in Search and Rescue Operations Using Deep CNN Detectors. IEEE Access, 9, 37905–37922. https://doi.org/10.1109/access.2021.3063681
- Yang, L., Zhang, X., Li, Z., Li, L., Shi, Y. (2025). A LODBO algorithm for multi-UAV search and rescue path planning in disaster areas. Chinese Journal of Aeronautics, 38 (2), 103301. https://doi.org/10.1016/j.cja.2024.11.011
- Guo, Y., Song, Y., Li, J., Ou, J., Xing, L., Zhang, Y. (2024). A Tabu-Based Bees Algorithm for Unmanned Aerial Vehicles in Maritime Search and Rescue Path Planning. Intelligent Engineering Optimisation with the Bees Algorithm, 353–365. https://doi.org/10.1007/978-3-031-64936-3_18
- Goncalves, L., Damas, B. (2022). Automatic detection of rescue targets in maritime search and rescue missions using UAVs. 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 1638–1643. https://doi.org/10.1109/icuas54217.2022.9836137
- Zhang, H., Sun, J., Yang, B., Shi, Y., Li, Z. (2020). Optimal search and rescue route design using an improved ant colony optimization. Information Technology And Control, 49 (3), 438–447. https://doi.org/10.5755/j01.itc.49.3.25295
- Cho, S. W., Park, H. J., Lee, H., Shim, D. H., Kim, S.-Y. (2021). Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Computers & Industrial Engineering, 161, 107612. https://doi.org/10.1016/j.cie.2021.107612
- Dinnbier, N. M., Thueux, Y., Savvaris, A., Tsourdos, A. (2017). Target detection using Gaussian mixture models and fourier transforms for UAV maritime search and rescue. 2017 International Conference on Unmanned Aircraft Systems (ICUAS), 1418–1424. https://doi.org/10.1109/icuas.2017.7991312
- Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H. (2021). Humanitarian Drones: A Review and Research Agenda. Internet of Things, 16, 100434. https://doi.org/10.1016/j.iot.2021.100434
- Laghari, A. A., Jumani, A. K., Laghari, R. A., Nawaz, H. (2023). Unmanned aerial vehicles: A review. Cognitive Robotics, 3, 8–22. https://doi.org/10.1016/j.cogr.2022.12.004
- Khudov, H. (2020). The Bayes Rule of Decision Making in Joint Optimization of Search and Detection of Objects in Technical Systems. International Journal of Emerging Trends in Engineering Research, 8 (1), 7–12. https://doi.org/10.30534/ijeter/2020/02812020
- Khudov, H., Mynko, P., Ikhsanov, S., Diakonov, O., Kovalenko, O., Solomonenko, Y. et al. (2021). Development a method for determining the coordinates of air objects by radars with the additional use of multilateration technology. Eastern-European Journal of Enterprise Technologies, 5 (9 (113)), 6–16. https://doi.org/10.15587/1729-4061.2021.242935
- Khudov, H., Makoveichuk, O., Kostyria, O., Butko, I., Poliakov, A., Kozhushko, Y. et al. (2024). Devising a method for determining the coordinates of an unmanned aerial vechicle via a network of portable spectrum analyzers. Eastern-European Journal of Enterprise Technologies, 6 (9 (132)), 97–107. https://doi.org/10.15587/1729-4061.2024.318551
- Bellman Equation. Available at: https://www.geeksforgeeks.org/bellman-equation/
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Hennadii Khudov, Illia Hridasov, Igor Ruban, Oleksandr Makoveichuk, Ihor Butko, Vladyslav Khudov, Iurii Ielisov, Volodymyr Maliuha, Mykola Yaloveha, Rostyslav Khudov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






