Development of an approach to managing transport logistics at a construction site
DOI:
https://doi.org/10.15587/1729-4061.2026.361917Keywords:
A*, construction logistics, hexagonal environment model, machine learning, multi-agent, STGNNAbstract
This study investigates the process that forms a vehicle route in a complex logistics environment. The task addressed relates to the lack of a full-fledged logic in autonomous decision-making regarding operational routing in specialized logistics systems.
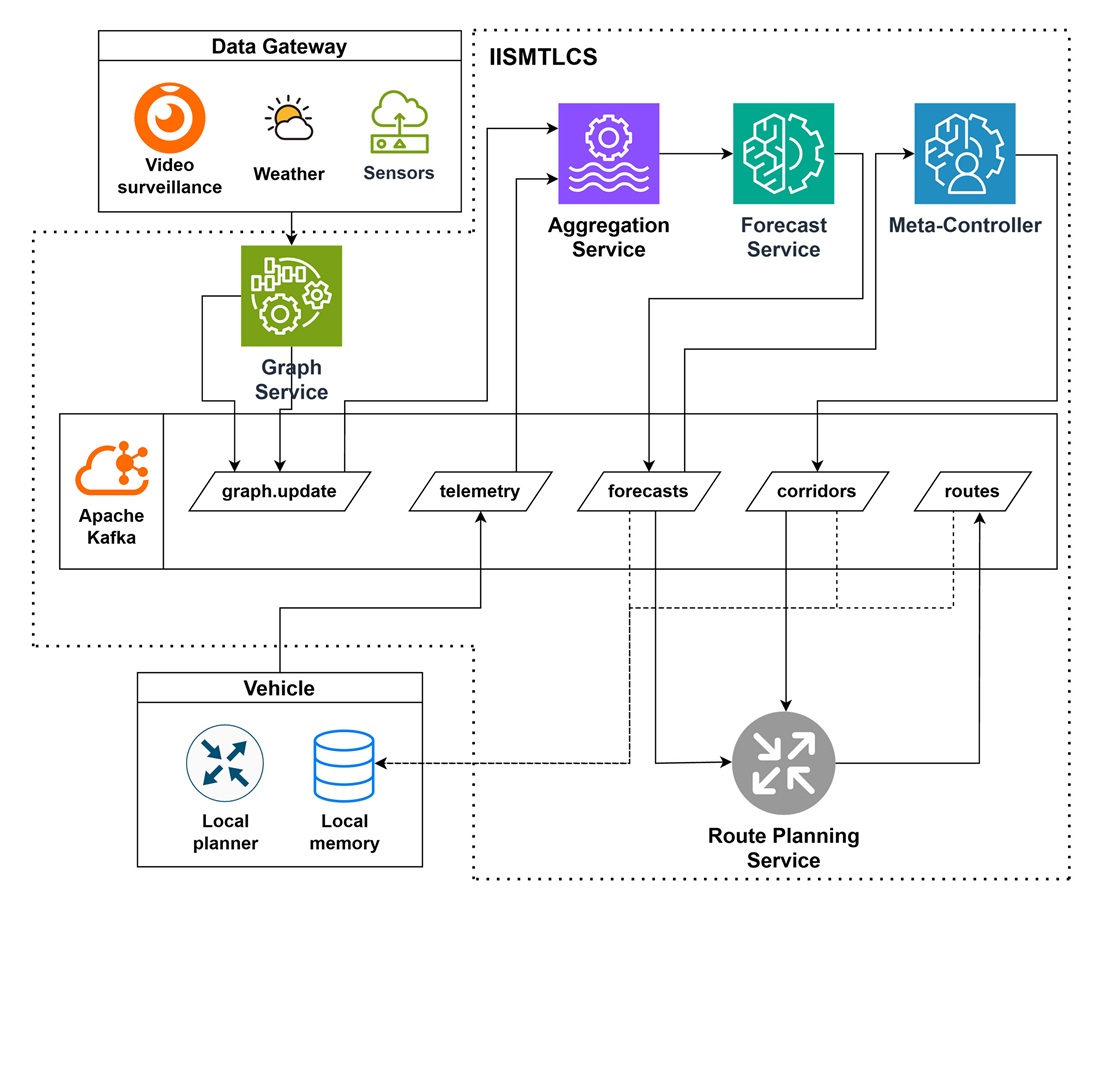
An analysis of modern transport logistics management systems revealed their limitations in terms of the efficiency and explainability of the logic of autonomous decision-making regarding route replanning. An approach to route formation has been devised that combines the modified A* algorithm, multi-agent reinforcement learning, and spatio-temporal graph convolutional networks (STGCNs).
Distinctive features of this approach are the combination of spatial-temporal forecasting, multi-agent decision-making, and modular system architecture, which provides adaptability, scalability, resistance to communication degradation, as well as explainability of transport routing decisions in closed reconfigurable networks.
Experimental comparison of the devised approach and analogs based on A* and STGCN, carried out on a simulation model of the logistics environment at a construction site in residential area, showed its statistical superiority in terms of the route travel time criterion. With a threshold of this criterion of 300 s, the proposed approach achieved this indicator in 90% of cases, and the approaches based on STGCN and A* – in 79% and 57% of cases. In this case, the value of the 95th percentile was 310 s, 360 s, and 410 s for the proposed approach, STGCN, and A*. These results are explained by the combination of network state prediction and adaptive route replanning.
The findings could be used in the design of intelligent transport logistics management systems at other facilities with dynamic transport infrastructure
References
- Nguyen, H. A. D., Ha, Q. P. (2022). Robotic autonomous systems for earthmoving equipment operating in volatile conditions and teaming capacity: a survey. Robotica, 41 (2), 486–510. https://doi.org/10.1017/s0263574722000339
- Mazurenko, R., Yeremenko, B. (2024). Intelligent traffic management system of a big city: ontology concept “decision models”. Management of Development of Complex Systems, 57, 174–180. https://doi.org/10.32347/2412-9933.2024.57.174-180
- Bortolini, R., Formoso, C. T., Viana, D. D. (2019). Site logistics planning and control for engineer-to-order prefabricated building systems using BIM 4D modeling. Automation in Construction, 98, 248–264. https://doi.org/10.1016/j.autcon.2018.11.031
- Whitlock, K., Abanda, F. H., Manjia, M. B., Pettang, C., Nkeng, G. E. (2021). 4D BIM for Construction Logistics Management. CivilEng, 2 (2), 325–348. https://doi.org/10.3390/civileng2020018
- Jiang, Y., Li, M., Li, M., Liu, X., Zhong, R. Y., Pan, W., Huang, G. Q. (2022). Digital twin-enabled real-time synchronization for planning, scheduling, and execution in precast on-site assembly. Automation in Construction, 141, 104397. https://doi.org/10.1016/j.autcon.2022.104397
- Choudhary, A. (2024). Internet of Things: a comprehensive overview, architectures, applications, simulation tools, challenges and future directions. Discover Internet of Things, 4 (1). https://doi.org/10.1007/s43926-024-00084-3
- Tuhaise, V. V., Tah, J. H. M., Abanda, F. H. (2023). Technologies for digital twin applications in construction. Automation in Construction, 152, 104931. https://doi.org/10.1016/j.autcon.2023.104931
- Le, T., Fan, R. (2023). Digital Twins for Logistics and Supply Chain Systems: Literature Review, Conceptual Framework, Research Potential, and Practical Challenges. https://doi.org/10.2139/ssrn.4516184
- de Carvalho, J. P., Dimitrakopoulos, R. (2021). Integrating Production Planning with Truck-Dispatching Decisions through Reinforcement Learning While Managing Uncertainty. Minerals, 11 (6), 587. https://doi.org/10.3390/min11060587
- Yeremenko, B., Mazurenko, R., Stetsyk, O., Buhrov, A. (2023). Intelligent Management of Traffic Flows in Large Cities. TRANSBALTICA XIII: Transportation Science and Technology, 33–42. https://doi.org/10.1007/978-3-031-25863-3_4
- Lin, K., Zhao, R., Xu, Z., Zhou, J. (2018). Efficient Large-Scale Fleet Management via Multi-Agent Deep Reinforcement Learning. Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 1774–1783. https://doi.org/10.1145/3219819.3219993
- Duszak, P., Siemiątkowska, B., Więckowski, R. (2021). Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sensing, 13 (21), 4216. https://doi.org/10.3390/rs13214216
- Zhang, Z., Zhang, J., Zhao, Y., Zhu, Z., Guo, J. (2024). A novel hexagonal grid map model and regenerated heuristic factor based strategy for intelligent manufacturing system’s AGV path planning problem solving. Computers & Industrial Engineering, 192, 110154. https://doi.org/10.1016/j.cie.2024.110154
- Schrader, M., Kumar, N., Collignon, N., Sørig, E., Yoon, S., Srivastava, A. et al. (2023). Modelling the performance of delivery vehicles across urban micro-regions to accelerate the transition to cargo-bike logistics. arXiv. https://doi.org/10.48550/arXiv.2301.12887
- Dijkstra, E. W. (1959). A note on two problems in connexion with graphs. Numerische Mathematik, 1 (1), 269–271. https://doi.org/10.1007/bf01386390
- Hart, P., Nilsson, N., Raphael, B. (1968). A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Transactions on Systems Science and Cybernetics, 4 (2), 100–107. https://doi.org/10.1109/tssc.1968.300136
- Stentz, A. (1995). The focussed D* algorithm for real-time replanning. In IJCAI'95: Proceedings of the 14th international joint conference on Artificial intelligence, 1652–1659. Available at: https://dl.acm.org/doi/10.5555/1643031.1643113
- Koenig, S., Likhachev, M., Furcy, D. (2004). Lifelong Planning A∗. Artificial Intelligence, 155 (1-2), 93–146. https://doi.org/10.1016/j.artint.2003.12.001
- Koenig, S., Likhachev, M. (2002). D*Lite. Eighteenth national conference on Artificial intelligence, 476–483. Available at: https://dl.acm.org/doi/10.5555/777092.777167
- Busoniu, L., Babuska, R., De Schutter, B. (2008). A Comprehensive Survey of Multiagent Reinforcement Learning. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 38 (2), 156–172. https://doi.org/10.1109/tsmcc.2007.913919
- Yu, C., Velu, A., Vinitsky, E., Gao, J., Wang, Y., Bayen, A., Wu, Y. (2022). The Surprising Effectiveness of PPO in Cooperative Multi-Agent Games. Advances in Neural Information Processing Systems 35, 24611–24624. https://doi.org/10.52202/068431-1787
- Yu, J., LaValle, S. (2013). Structure and Intractability of Optimal Multi-Robot Path Planning on Graphs. Proceedings of the AAAI Conference on Artificial Intelligence, 27 (1), 1443–1449. https://doi.org/10.1609/aaai.v27i1.8541
- Rashid, T., Samvelyan, M., de Witt, C. S., Farquhar, G., Foerster, J., Whiteson, S. (2018). QMIX: Monotonic value function factorisation for deep multi-agent reinforcement learning. arXiv. https://doi.org/10.48550/arXiv.1803.11485
- Lowe, R., Wu, Y., Tamar, A., Harb, J., Abbeel, P., Mordatch, I. (2017). Multi-agent actor-critic for mixed cooperative-competitive environments. arXiv. https://doi.org/10.48550/arXiv.1706.02275
- Li, Y., Yu, R., Shahabi, C., Liu, Y. (2018). Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting. arXiv. https://doi.org/10.48550/arXiv.1707.01926
- Yu, B., Yin, H., Zhu, Z. (2018). Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting. Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, 3634–3640. https://doi.org/10.24963/ijcai.2018/505
- Wu, Z., Pan, S., Long, G., Jiang, J., Zhang, C. (2019). Graph WaveNet for Deep Spatial-Temporal Graph Modeling. Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, 1907–1913. https://doi.org/10.24963/ijcai.2019/264
- Zhu, J., Wang, Q., Tao, C., Deng, H., Zhao, L., Li, H. (2021). AST-GCN: Attribute-Augmented Spatiotemporal Graph Convolutional Network for Traffic Forecasting. IEEE Access, 9, 35973–35983. https://doi.org/10.1109/access.2021.3062114
- Likhachev, M., Gordon, G., Thrun, S. (2003). ARA*: anytime A* with provable bounds on sub-optimality. NIPS'03: Proceedings of the 17th International Conference on Neural Information Processing Systems. Available at: https://dl.acm.org/doi/10.5555/2981345.2981441
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Pavlo Pasieka, Oleksii Panko, Nataliia Poltorachenko, Svitlana Terenchuk, Bohdan Yeremenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






