Розробка підходу до керування транспортною логістикою на будівельному майданчику
DOI:
https://doi.org/10.15587/1729-4061.2026.361917Ключові слова:
A*, будівельна логістика, гексагональна модель середовища, машинне навчання, мультіагентність, STGNNАнотація
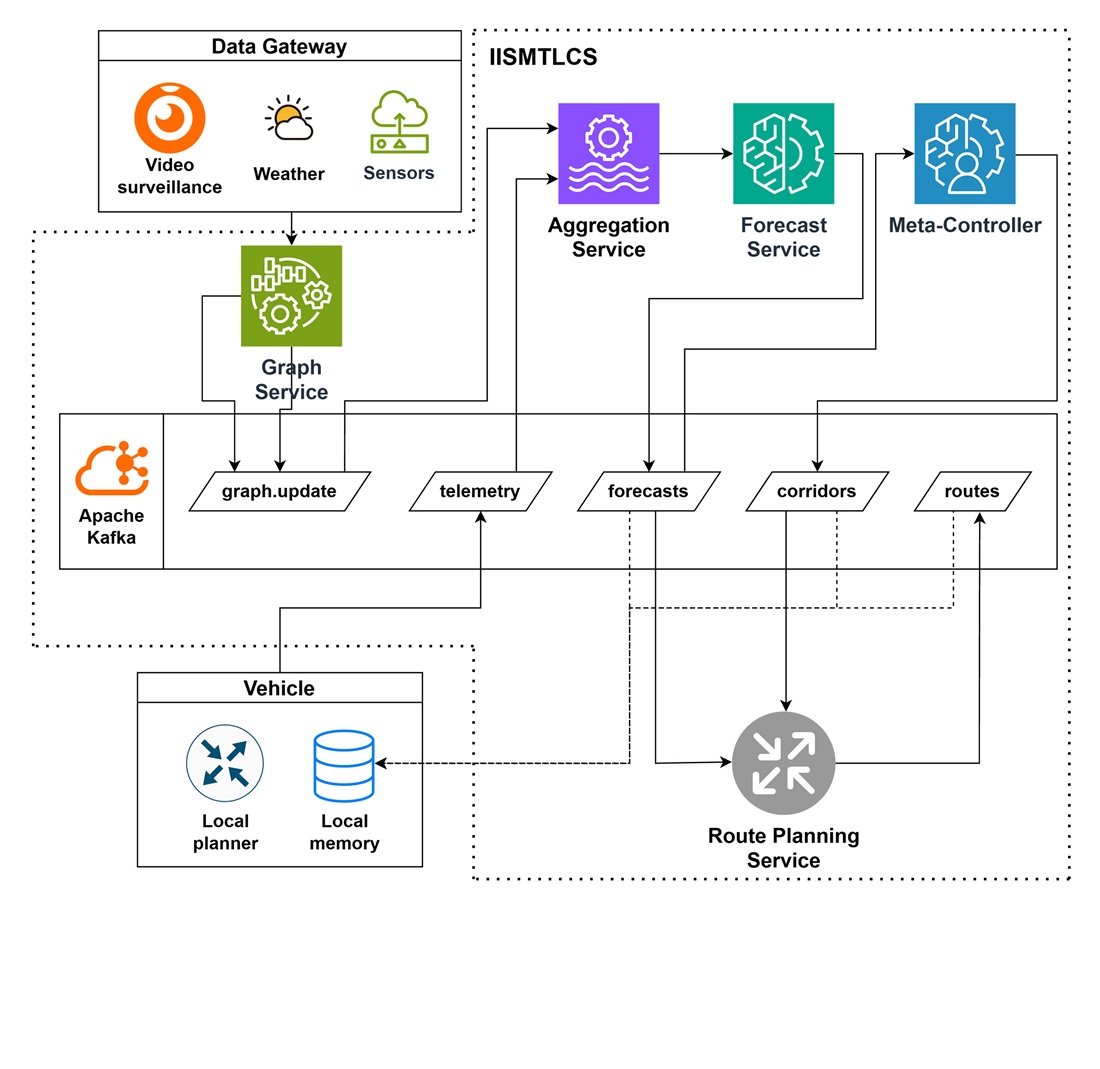
Об’єкт дослідження – процес формування маршруту транспортного засобу в умовах складного логістичного середовища. Проблема, що вирішувалася, полягає у відсутності повноцінної логіки автономного прийняття рішень щодо оперативної маршрутизації у спеціалізованих логістичних системах. Аналіз сучасних систем керування транспортною логістикою виявив їх обмеження щодо оперативності і пояснюваності логіки автономного прийняття рішень щодо перепланування маршрутів. Розроблено підхід до формування маршрутів, що поєднує модифікований алгоритм A*, багатоагентне навчання з підкріпленням і просторово-часові графові нейронні мережі (STGCN). Відмінними рисами цього підходу є поєднання просторово-часового прогнозування, багатоагентного прийняття рішень і модульної архітектури системи, що забезпечує адаптивність, масштабованість, стійкість до погіршення зв’язку і пояснюваність рішень щодо маршрутизації транспорту в закритих реконфігурованих мережах. Експериментальне порівняння розробленого підходу і аналогів на базі A* і STGCN, проведене на імітаційній моделі логістичного середовища будівельного майданчика квартальної забудови, показало його статистичну перевагу за критерієм часу проходження маршруту. При пороговому цього критерію 300 с запропонований підхід досягав цього показника у 90% випадків, а підходи на основі STGCN і A* – у 79% і 57% випадків. При цьому, значення 95-го процентиля становило; 310 с, 360 с і 410 с для запропонованого підходу, STGCN і A*. Ці результати пояснюються поєднанням прогнозування стану мережі і адаптивного перепланування маршрутів. Результати дослідження можуть бути використані при проєктування інтелектуальних систем керування транспортною логістикою на інших об’єктах із динамічною транспортною інфраструктурою
Посилання
- Nguyen, H. A. D., Ha, Q. P. (2022). Robotic autonomous systems for earthmoving equipment operating in volatile conditions and teaming capacity: a survey. Robotica, 41 (2), 486–510. https://doi.org/10.1017/s0263574722000339
- Mazurenko, R., Yeremenko, B. (2024). Intelligent traffic management system of a big city: ontology concept “decision models”. Management of Development of Complex Systems, 57, 174–180. https://doi.org/10.32347/2412-9933.2024.57.174-180
- Bortolini, R., Formoso, C. T., Viana, D. D. (2019). Site logistics planning and control for engineer-to-order prefabricated building systems using BIM 4D modeling. Automation in Construction, 98, 248–264. https://doi.org/10.1016/j.autcon.2018.11.031
- Whitlock, K., Abanda, F. H., Manjia, M. B., Pettang, C., Nkeng, G. E. (2021). 4D BIM for Construction Logistics Management. CivilEng, 2 (2), 325–348. https://doi.org/10.3390/civileng2020018
- Jiang, Y., Li, M., Li, M., Liu, X., Zhong, R. Y., Pan, W., Huang, G. Q. (2022). Digital twin-enabled real-time synchronization for planning, scheduling, and execution in precast on-site assembly. Automation in Construction, 141, 104397. https://doi.org/10.1016/j.autcon.2022.104397
- Choudhary, A. (2024). Internet of Things: a comprehensive overview, architectures, applications, simulation tools, challenges and future directions. Discover Internet of Things, 4 (1). https://doi.org/10.1007/s43926-024-00084-3
- Tuhaise, V. V., Tah, J. H. M., Abanda, F. H. (2023). Technologies for digital twin applications in construction. Automation in Construction, 152, 104931. https://doi.org/10.1016/j.autcon.2023.104931
- Le, T., Fan, R. (2023). Digital Twins for Logistics and Supply Chain Systems: Literature Review, Conceptual Framework, Research Potential, and Practical Challenges. https://doi.org/10.2139/ssrn.4516184
- de Carvalho, J. P., Dimitrakopoulos, R. (2021). Integrating Production Planning with Truck-Dispatching Decisions through Reinforcement Learning While Managing Uncertainty. Minerals, 11 (6), 587. https://doi.org/10.3390/min11060587
- Yeremenko, B., Mazurenko, R., Stetsyk, O., Buhrov, A. (2023). Intelligent Management of Traffic Flows in Large Cities. TRANSBALTICA XIII: Transportation Science and Technology, 33–42. https://doi.org/10.1007/978-3-031-25863-3_4
- Lin, K., Zhao, R., Xu, Z., Zhou, J. (2018). Efficient Large-Scale Fleet Management via Multi-Agent Deep Reinforcement Learning. Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 1774–1783. https://doi.org/10.1145/3219819.3219993
- Duszak, P., Siemiątkowska, B., Więckowski, R. (2021). Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sensing, 13 (21), 4216. https://doi.org/10.3390/rs13214216
- Zhang, Z., Zhang, J., Zhao, Y., Zhu, Z., Guo, J. (2024). A novel hexagonal grid map model and regenerated heuristic factor based strategy for intelligent manufacturing system’s AGV path planning problem solving. Computers & Industrial Engineering, 192, 110154. https://doi.org/10.1016/j.cie.2024.110154
- Schrader, M., Kumar, N., Collignon, N., Sørig, E., Yoon, S., Srivastava, A. et al. (2023). Modelling the performance of delivery vehicles across urban micro-regions to accelerate the transition to cargo-bike logistics. arXiv. https://doi.org/10.48550/arXiv.2301.12887
- Dijkstra, E. W. (1959). A note on two problems in connexion with graphs. Numerische Mathematik, 1 (1), 269–271. https://doi.org/10.1007/bf01386390
- Hart, P., Nilsson, N., Raphael, B. (1968). A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Transactions on Systems Science and Cybernetics, 4 (2), 100–107. https://doi.org/10.1109/tssc.1968.300136
- Stentz, A. (1995). The focussed D* algorithm for real-time replanning. In IJCAI'95: Proceedings of the 14th international joint conference on Artificial intelligence, 1652–1659. Available at: https://dl.acm.org/doi/10.5555/1643031.1643113
- Koenig, S., Likhachev, M., Furcy, D. (2004). Lifelong Planning A∗. Artificial Intelligence, 155 (1-2), 93–146. https://doi.org/10.1016/j.artint.2003.12.001
- Koenig, S., Likhachev, M. (2002). D*Lite. Eighteenth national conference on Artificial intelligence, 476–483. Available at: https://dl.acm.org/doi/10.5555/777092.777167
- Busoniu, L., Babuska, R., De Schutter, B. (2008). A Comprehensive Survey of Multiagent Reinforcement Learning. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 38 (2), 156–172. https://doi.org/10.1109/tsmcc.2007.913919
- Yu, C., Velu, A., Vinitsky, E., Gao, J., Wang, Y., Bayen, A., Wu, Y. (2022). The Surprising Effectiveness of PPO in Cooperative Multi-Agent Games. Advances in Neural Information Processing Systems 35, 24611–24624. https://doi.org/10.52202/068431-1787
- Yu, J., LaValle, S. (2013). Structure and Intractability of Optimal Multi-Robot Path Planning on Graphs. Proceedings of the AAAI Conference on Artificial Intelligence, 27 (1), 1443–1449. https://doi.org/10.1609/aaai.v27i1.8541
- Rashid, T., Samvelyan, M., de Witt, C. S., Farquhar, G., Foerster, J., Whiteson, S. (2018). QMIX: Monotonic value function factorisation for deep multi-agent reinforcement learning. arXiv. https://doi.org/10.48550/arXiv.1803.11485
- Lowe, R., Wu, Y., Tamar, A., Harb, J., Abbeel, P., Mordatch, I. (2017). Multi-agent actor-critic for mixed cooperative-competitive environments. arXiv. https://doi.org/10.48550/arXiv.1706.02275
- Li, Y., Yu, R., Shahabi, C., Liu, Y. (2018). Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting. arXiv. https://doi.org/10.48550/arXiv.1707.01926
- Yu, B., Yin, H., Zhu, Z. (2018). Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting. Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, 3634–3640. https://doi.org/10.24963/ijcai.2018/505
- Wu, Z., Pan, S., Long, G., Jiang, J., Zhang, C. (2019). Graph WaveNet for Deep Spatial-Temporal Graph Modeling. Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, 1907–1913. https://doi.org/10.24963/ijcai.2019/264
- Zhu, J., Wang, Q., Tao, C., Deng, H., Zhao, L., Li, H. (2021). AST-GCN: Attribute-Augmented Spatiotemporal Graph Convolutional Network for Traffic Forecasting. IEEE Access, 9, 35973–35983. https://doi.org/10.1109/access.2021.3062114
- Likhachev, M., Gordon, G., Thrun, S. (2003). ARA*: anytime A* with provable bounds on sub-optimality. NIPS'03: Proceedings of the 17th International Conference on Neural Information Processing Systems. Available at: https://dl.acm.org/doi/10.5555/2981345.2981441
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2026 Pavlo Pasieka, Oleksii Panko, Nataliia Poltorachenko, Svitlana Terenchuk, Bohdan Yeremenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







