Використання сукупності інформаційних ознак об’єкта прив’язки для формування вирішальної функції системою технічного зору при місцевизначенні мобільних роботів
DOI:
https://doi.org/10.15587/1729-4061.2024.303989Ключові слова:
мобільний робот, вирішальна функція, інформаційні ознаки, пороги квантування, відношення сигнал-шумАнотація
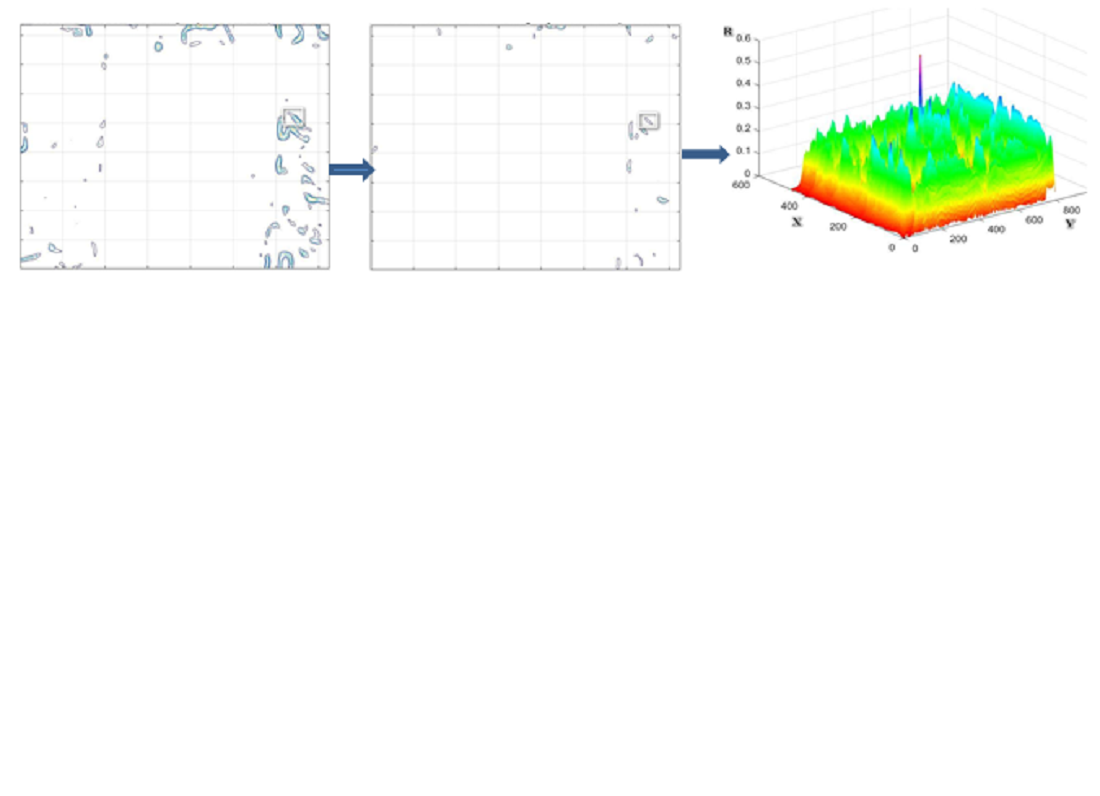
Об’єктом дослідження є процес формування вирішальної функції оптико-електронною системою технічного зору в умовах впливу завад на поточне зображення, що формується в процесі місцевизначення мобільного роботу. В статті наведено результати вирішення проблеми формування вирішальної функції при зниженні відношення сигнал-шум поточного зображення шляхом використання сукупності інформативних ознак для здійснення селекції об’єкта прив’язки, а саме, яскравості, контрасту та його площі. Селекцію об’єкта прив’язки запропоновано здійснювати шляхом вибору відповідних значень порогів квантування поточного зображення для обраних інформативних ознак з урахуванням відношення сигнал-шум, при якому забезпечуються необхідна ймовірність селекції об'єкта. Встановлена залежність ймовірності селекції об'єкта від обраних значень величини порогів квантування. Використання отриманих результатів забезпечить формування унімодальної вирішальної функції при здійсненні місцевизначення мобільних роботів на поверхнях візування зі слабко вираженими яскравісними та контрастними характеристиками об’єктів, а також при їх малих геометричних розмірах. Шляхом моделювання оцінено ймовірність формування вирішальної функції в залежності від ступеня зашумленості поточних зображень. Показано, що застосування запропонованого підходу відповідно дозволяє здійснювати селекцію об'єктів з ймовірністю в межах від 0.78 до 0,99 для значень відношення сигнал-шум зображень, що формуються системою технічного зору в реальних умовах. Метод формування вирішальної функції в умовах впливу завад може бути реалізований в алгоритмах обробки інформації, що використовуються в оптико-електронних системах технічного зору для здійснення навігації безпілотних літальних апаратів
Посилання
- Sotnikov, O., Tymochko, O., Bondarchuk, S., Dzhuma, L., Rudenko, V., Mandryk, Ya. et al. (2023). Generating a Set of Reference Images for Reliable Condition Monitoring of Critical Infrastructure using Mobile Robots. Problems of the Regional Energetics, 2 (58), 41–51. https://doi.org/10.52254/1857-0070.2023.2-58.04
- Sotnikov, O., Kartashov, V. G., Tymochko, O., Sergiyenko, O., Tyrsa, V., Mercorelli, P., Flores-Fuentes, W. (2019). Methods for Ensuring the Accuracy of Radiometric and Optoelectronic Navigation Systems of Flying Robots in a Developed Infrastructure. Machine Vision and Navigation, 537–577. https://doi.org/10.1007/978-3-030-22587-2_16
- Volkov, V. Yu. (2017). Adaptive Extraction of Small Objects in Digital Images. Izvestiya Vysshikh Uchebnykh Zavedenii Rossii. Radioelektronika [Journal of the Russian Universities. Radioelectronics], 1, 17–28.
- Volkov, V. Yu., Turnetskiy, L. S. (2009). Porogovaya obrabotka dlya segmentatsii i vydeleniya protyazhennyh obektov na tsifrovyh izobrazheniyah. Informatsionno-upravlyayushchie sistemy, 5 (42), 10–13.
- Fursov, V., Bibikov, S., Yakimov, P. (2013). Localization of objects contours with different scales in images using hough transform. Computer Optics, 37 (4), 496–502. https://doi.org/10.18287/0134-2452-2013-37-4-496-502
- Abdollahi, A., Pradhan, B. (2021). Integrated technique of segmentation and classification methods with connected components analysis for road extraction from orthophoto images. Expert Systems with Applications, 176, 114908. https://doi.org/10.1016/j.eswa.2021.114908
- Bakhtiari, H. R. R., Abdollahi, A., Rezaeian, H. (2017). Semi automatic road extraction from digital images. The Egyptian Journal of Remote Sensing and Space Science, 20 (1), 117–123. https://doi.org/10.1016/j.ejrs.2017.03.001
- Yeromina, N., Petrov, S., Tantsiura, A., Iasechko, M., Larin, V. (2018). Formation of reference images and decision function in radiometric correlationextremal navigation systems. Eastern-European Journal of Enterprise Technologies, 4 (9 (94)), 27–35. https://doi.org/10.15587/1729-4061.2018.139723
- Sotnikov, A., Tarshyn, V., Yeromina, N., Petrov, S., Antonenko, N. (2017). A method for localizing a reference object in a current image with several bright objects. Eastern-European Journal of Enterprise Technologies, 3 (9 (87)), 68–74. https://doi.org/10.15587/1729-4061.2017.101920
- Tsvetkov, O., Tananykina, L. (2015). A preprocessing method for correlation-extremal systems. Computer Optics, 39 (5), 738–743. https://doi.org/10.18287/0134-2452-2015-39-5-738-743
- Senthilnath, J., Rajeshwari, M., Omkar, S. N. (2009). Automatic road extraction using high resolution satellite image based on texture progressive analysis and normalized cut method. Journal of the Indian Society of Remote Sensing, 37 (3), 351–361. https://doi.org/10.1007/s12524-009-0043-5
- Zhang, X., Du, B., Wu, Z., Wan, T. (2022). LAANet: lightweight attention-guided asymmetric network for real-time semantic segmentation. Neural Computing and Applications, 34 (5), 3573–3587. https://doi.org/10.1007/s00521-022-06932-z
- Song, Y., Shang, C., Zhao, J. (2023). LBCNet: A lightweight bilateral cascaded feature fusion network for real-time semantic segmentation. The Journal of Supercomputing, 80 (6), 7293–7315. https://doi.org/10.1007/s11227-023-05740-z
- Tarshyn, V. A., Sotnikov, A. M., Sydorenko, R. G., Megelbey, V. V. (2015). Preparation of reference patterns for high-fidelity correlation-extreme navigation systems on basis of forming of paul fractal dimensions. Systemy ozbroiennia i viyskova tekhnika, 2, 142–144. Available at: http://nbuv.gov.ua/UJRN/soivt_2015_2_38
- Abeysinghe, W., Wong, M., Hung, C.-C., Bechikh, S. (2019). Multi-Objective Evolutionary Algorithm for Image Segmentation. 2019 SoutheastCon. https://doi.org/10.1109/southeastcon42311.2019.9020457
- Grinias, I., Panagiotakis, C., Tziritas, G. (2016). MRF-based segmentation and unsupervised classification for building and road detection in peri-urban areas of high-resolution satellite images. ISPRS Journal of Photogrammetry and Remote Sensing, 122, 145–166. https://doi.org/10.1016/j.isprsjprs.2016.10.010
- Bai, H., Cheng, J., Su, Y., Wang, Q., Han, H., Zhang, Y. (2022). Multi-Branch Adaptive Hard Region Mining Network for Urban Scene Parsing of High-Resolution Remote-Sensing Images. Remote Sensing, 14 (21), 5527. https://doi.org/10.3390/rs14215527
- Sambaturu, B., Gupta, A., Jawahar, C. V., Arora, C. (2023). ScribbleNet: Efficient interactive annotation of urban city scenes for semantic segmentation. Pattern Recognition, 133, 109011. https://doi.org/10.1016/j.patcog.2022.109011
- Khudov, H., Makoveichuk, O., Butko, I., Gyrenko, I., Stryhun, V., Bilous, O. et al. (2022). Devising a method for segmenting camouflaged military equipment on images from space surveillance systems using a genetic algorithm. Eastern-European Journal of Enterprise Technologies, 3 (9 (117)), 6–14. https://doi.org/10.15587/1729-4061.2022.259759
- Körting, T. S., Fonseca, L. M. G., Dutra, L. V., Silva, F. C. (2010). Image re-segmentation applied to urban imagery. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII, B3b, 393–398. https://doi.org/10.13140/2.1.5133.9529
- Dikmen, M., Halici, U. (2014). A Learning-Based Resegmentation Method for Extraction of Buildings in Satellite Images. IEEE Geoscience and Remote Sensing Letters, 11 (12), 2150–2153. https://doi.org/10.1109/lgrs.2014.2321658
- Ruban, I., Khudov, H., Makoveichuk, O., Khizhnyak, I., Lukova-Chuiko, N., Pevtsov, H. et al. (2019). Method for determining elements of urban infrastructure objects based on the results from air monitoring. Eastern-European Journal of Enterprise Technologies, 4 (9 (100)), 52–61. https://doi.org/10.15587/1729-4061.2019.174576
- Khudov, H., Khudov, V., Yuzova, I., Solomonenko, Y., Khizhnyak, I. (2021). The Method of Determining the Elements of Urban Infrastructure Objects Based on Hough Transformation. Studies in Systems, Decision and Control, 247–265. https://doi.org/10.1007/978-3-030-87675-3_15
- Yeromina, N., Udovovenko, S., Tiurina, V., Boichenko, О., Breus, P., Onishchenko, Y. et al. (2023). Segmentation of Images Used in Unmanned Aerial Vehicles Navigation Systems. Problems of the Regional Energetics, 4 (60), 30–42. https://doi.org/10.52254/1857-0070.2023.4-60.03
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2024 Alexander Sotnikov, Valeriia Tiurina, Konstantin Petrov, Viktoriia Lukyanova, Oleksiy Lanovyy, Yurii Onishchenko, Yurii Gnusov, Serhii Petrov, Оleksii Boichenko, Pavlo Breus

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






