Покращення розуміння 3D-сцен за допомогою текстових анотацій
DOI:
https://doi.org/10.15587/1729-4061.2025.323757Ключові слова:
великі мовні моделі, мовно-візуальні моделі, мультимодальне навчання, розуміння просторуАнотація
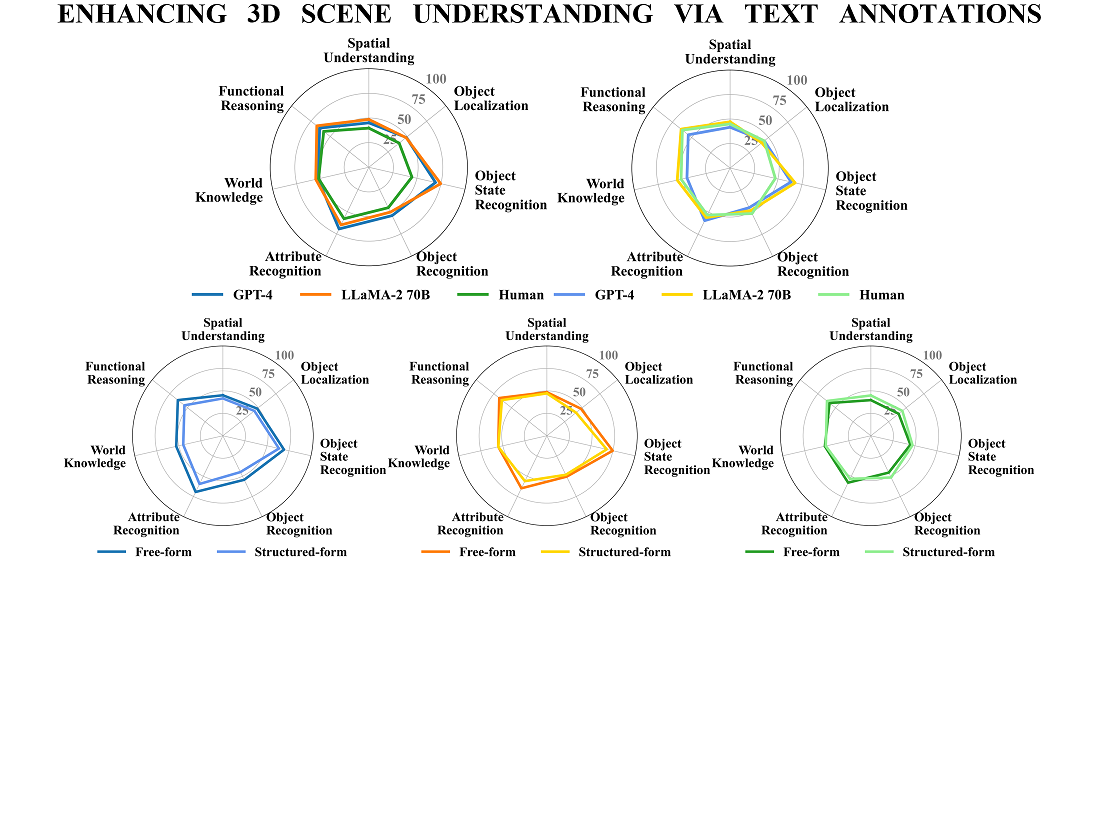
Об’єктом дослідження є використання текстових анотацій для представлення 3D-сцен. У роботі досліджено проблему інтеграції великих мовних моделей (ВММ) в складні 3D-середовища. На прикладі задачі Embodied Question Answering проаналізовано різні типи анотацій сцен та оцінено продуктивність ВММ на підмножині тестових епізодів набору даних OpenEQA. Метою дослідження було оцінити ефективність текстових описів сцен порівняно з візуальними даними для вирішення задач EQA. Методологія включала визначення довжини контексту для анотацій сцен, відмінностей між анотаціями в довільній та структурованій формах, а також аналіз впливу розміру моделей на результати роботи і порівняння результатів моделей з рівнем розуміння анотацій сцен людьми.
Отримані результати показали, що детальні описи, які включають перелік об’єктів, чітко характеризують їхні атрибути, просторові зв’язки та потенційні взаємодії, забезпечують переваги у виконанні EQA, навіть перевершуючи найсучасніший метод у OpenEQA – GPT-4V (57.6 % та 58.5 % для GPT-4 та LLaMA-2 відповідно проти 55.3 % GPT-4V). Результати пояснюються високим рівнем деталізації, яка забезпечує моделі контекстно чітку та інтерпретовану інформацію про сцену. Оптимальну довжину контексту для текстових описів визначено у розмірі 1517 токенів. Попри це, навіть найкращі текстові представлення не досягають рівня сприйняття та міркування, які демонструє людина, коли їй надано візуальні дані (50 % на текстових даних проти 86.8 % маючи відео). Отримані результати мають значення для розвитку мультимодальних моделей для задач Втіленого ШІ, зокрема робототехніки та автономних систем навігації. Вони також можуть бути застосовані для покращення взаємодії користувачів з тривимірними просторами у сфері віртуальної чи доповненої реальностей
Посилання
- Vaswani, A., Shazeer, N. M., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N. et al. (2017). Attention is All you Need. NIPS'17: Proceedings of the 31st International Conference on Neural Information Processing Systems. Available at: https://dl.acm.org/doi/10.5555/3295222.3295349
- Achiam, J., Adler, S., Agarwal, S., Ahmad, L., Akkaya, I., Aleman, F. L. (2023). Gpt-4 technical report. ArXiv. https://doi.org/10.48550/arXiv.2303.08774
- Gpt-4v(ision) technical work and authors. OpenAI. Available at: https://openai.com/contributions/gpt-4v
- . Gpt-4v(ision) system card. OpenAI. Available at: https://openai.com/index/gpt-4v-system-card/
- Yang, Z., Li, L., Lin, K., Wang, J., Lin, C., Liu, Z., Wang, L. (2023). The Dawn of LMMs: Preliminary Explorations with GPT-4V(ision). ArXiv. https://doi.org/10.48550/arXiv.2309.17421
- Touvron, H., Martin, L., Stone, K., Albert, P., Almahairi, A., Babaei, Y. et al. (2023). Llama 2: Open Foundation and Fine-Tuned Chat Models. ArXiv. https://doi.org/10.48550/arXiv.2307.09288
- Annepaka, Y., Pakray, P. (2024). Large language models: a survey of their development, capabilities, and applications. Knowledge and Information Systems, 67 (3), 2967–3022. https://doi.org/10.1007/s10115-024-02310-4
- Wei, J., Tay, Y., Bommasani, R., Raffel, C., Zoph, B., Borgeaud, S. et al. (2022). Emergent Abilities of Large Language Models. ArXiv. https://doi.org/10.48550/arXiv.2206.07682
- Ahn, M., Brohan, A., Brown, N., Chebotar, Y., Cortes, O., David, B. Et al. (2022). Do As I Can, Not As I Say: Grounding Language in Robotic Affordances. Conference on Robot Learning. ArXiv. https://doi.org/10.48550/arXiv.2204.01691
- Huang, W., Xia, F., Xiao, T., Chan, H., Liang, J., Florence, P. et al. (2023). Inner monologue: Embodied reasoning through planning with language models. ArXiv. https://doi.org/10.48550/arXiv.2207.05608
- Chen, B., Xia, F., Ichter, B., Rao, K., Gopalakrishnan, K., Ryoo, M. S. et al. (2023). Open-vocabulary Queryable Scene Representations for Real World Planning. 2023 IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/icra48891.2023.10161534
- Zhu, D., Chen, J., Shen, X., Li, X., Elhoseiny, M. (2023). MiniGPT-4: Enhancing Vision-Language Understanding with Advanced Large Language Models. ArXiv. https://doi.org/10.48550/arXiv.2304.10592
- Chen, J., Zhu, D., Shen, X., Li, X., Liu, Z., Zhang, P., Krishnamoorthi, R. et al. (2023). MiniGPT-v2: large language model as a unified interface for vision-language multi-task learning. ArXiv. https://doi.org/10.48550/arXiv.2310.09478
- Liu, H., Li, C., Wu, Q., Lee, Y. J. (2023). Visual instruction tuning. NIPS '23: Proceedings of the 37th International Conference on Neural Information Processing Systems. Available at: https://dl.acm.org/doi/10.5555/3666122.3667638
- Liu, H., Li, C., Li, Y., Lee, Y. J. (2024). Improved Baselines with Visual Instruction Tuning. 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 26286–26296. https://doi.org/10.1109/cvpr52733.2024.02484
- Driess, D., Xia, F., Sajjadi, M. S. M., Lynch, C., Chowdhery, A., Ichter, B. et al. (2023). PaLM-E: An embodied multimodal language model. ICML'23: Proceedings of the 40th International Conference on Machine Learning. Available at: https://dl.acm.org/doi/10.5555/3618408.3618748
- Majumdar, A., Ajay, A., Zhang, X., Putta, P., Yenamandra, S., Henaff, M. et al. (2024). OpenEQA: Embodied Question Answering in the Era of Foundation Models. 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 16488–16498. https://doi.org/10.1109/cvpr52733.2024.01560
- Das, A., Datta, S., Gkioxari, G., Lee, S., Parikh, D., Batra, D. (2018). Embodied Question Answering. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2135–213509. https://doi.org/10.1109/cvprw.2018.00279
- Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser, T., Niessner, M. (2017). ScanNet: Richly-Annotated 3D Reconstructions of Indoor Scenes. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2432–2443. https://doi.org/10.1109/cvpr.2017.261
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Ruslan Partsey, Vasyl Teslyuk, Oleksandr Maksymets, Vladyslav Humennyy, Volodymyr Kuzma

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






