Оцінка параметрів складних маневруючих цілей за допомогою фільтрації Калмана та багатомодельної адаптації
DOI:
https://doi.org/10.15587/1729-4061.2025.335274Ключові слова:
закон наведення, ракета, самонаведення, маневри, оцінкаАнотація
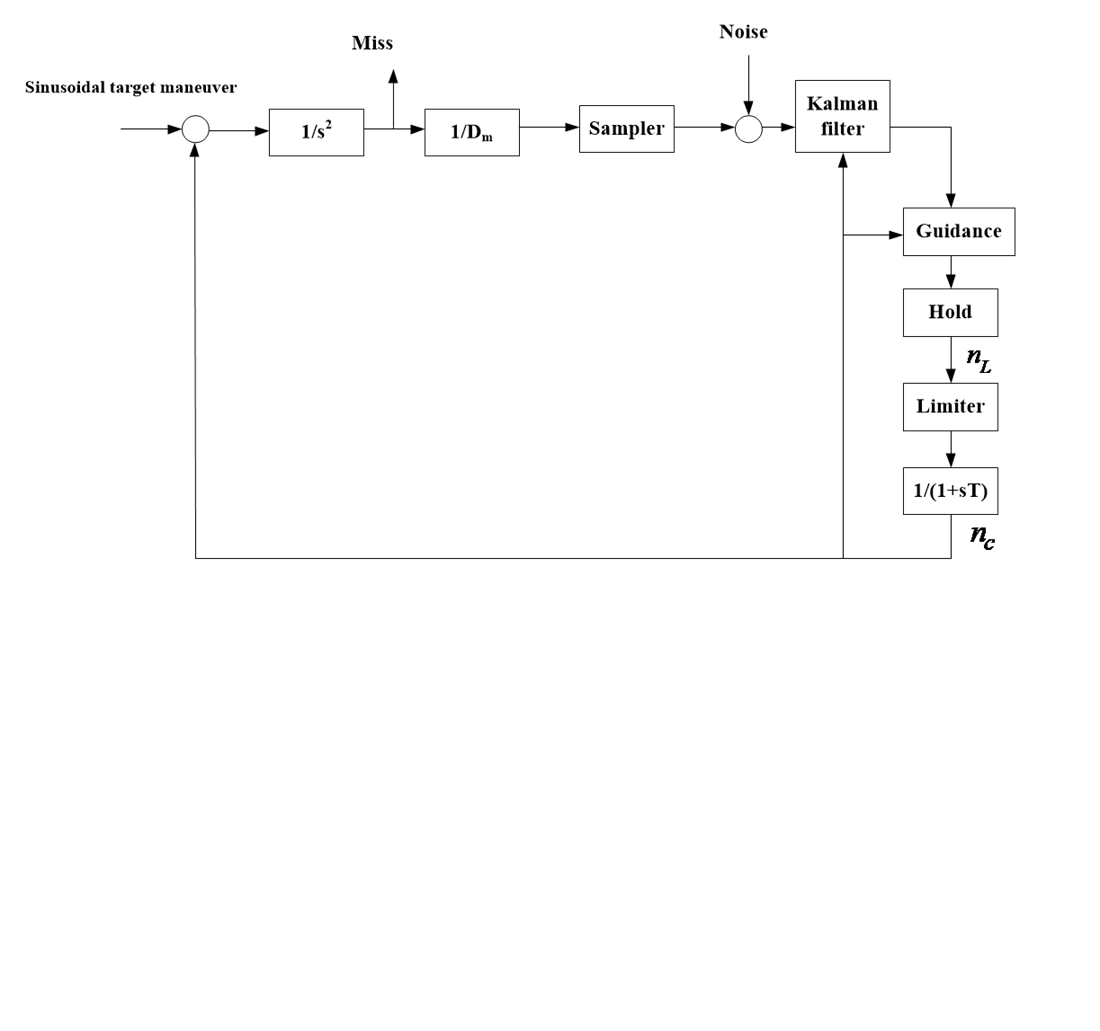
Об’єктом дослідження є система визначення кутових координат цілі на головці самонаведення ракети. Сучасні системи визначення координат цілі, що використовуються в головках самонаведення, часто працюють зі значними обмеженнями. Коли фактичний рух цілі відхиляється від спрощеної гіпотетичної моделі, що використовується для синтезу системи координат, виникає критична проблема: помилки в оцінці як координат, так і їх похідних складових швидко та значно зростають.
Проблема, яку було вирішено, полягає в оцінці параметрів складної маневруючої цілі. Але немає потреби знати частоту маневрування цілі.
У цьому дослідженні представлено новий алгоритм фільтрації, який точно оцінює всі параметри складних маневруючих цілей без попереднього знання їхньої частоти маневрування. Алгоритм досягає значної переваги, зменшуючи похибку оцінки більш ніж на 95% протягом перших 5 секунд. Завдяки своїй простій структурі, високій стабільності та швидкій збіжності, це надійне рішення є важливим для сучасних систем наведення, значно підвищуючи ефективність відстеження непередбачуваних загроз.
Ключовою перевагою запропонованого алгоритму є його проста структура. Крім того, він демонструє високі показники збіжності та виняткову стабільність, що є важливими атрибутами для застосувань у реальному часі. Його конструкція також забезпечує легкість практичної реалізації, що робить його життєздатним рішенням для сучасних систем наведення.
Алгоритм побудовано на сучасних методах керування, поєднуючи розширену фільтрацію Калмана з інтерактивними мультимоделями. Необхідно точно оцінити положення цілі, швидкість, прискорення та похідну прискорення без необхідності заздалегідь знати частоту маневру цілі
Посилання
- Tuan, N. N., Thi, N. D., Van Bang, N., Van Tuyen, T. (2021). Synthesis of Remote Control Law When Taking into Dynamics and Nonlinear of the Missile Stage. Intelligent Systems and Networks, 171–180. https://doi.org/10.1007/978-981-16-2094-2_22
- Nguen, V. B., Dang, K. Vy., Trin', K. F., Nguen, N. T. (2021). Synthesis of the maneuver target acceleration determines algorithm. Estestvennye i Tekhnicheskie Nauki, 3 (154). https://doi.org/10.25633/etn.2021.02.07
- Hsueh, M.-H., Huang, C.-I., Fu, L.-C. (2007). A Differential Game Based Guidance Law for the Interceptor Missiles. IECON 2007 - 33rd Annual Conference of the IEEE Industrial Electronics Society, 665–670. https://doi.org/10.1109/iecon.2007.4460196
- Li, X.-R., Jilkov, V. P. (2004). A survey of maneuvering target tracking: approximation techniques for nonlinear filtering. SPIE Proceedings. https://doi.org/10.1117/12.553357
- Jiyuan, L., Jun, Z., Yingying, L. (2018). Applying auto-adaptation filter to tracking of maneuvering target in special relative navigation. J. Northwest, Polytech. Univ., 4, 013.
- Liu, L., Wang, X., Yang, X., Liu, H., Li, J., Wang, P. (2023). Path planning techniques for mobile robots: Review and prospect. Expert Systems with Applications, 227, 120254. https://doi.org/10.1016/j.eswa.2023.120254
- Kabir, H., Tham, M.-L., Chang, Y. C. (2023). Internet of robotic things for mobile robots: Concepts, technologies, challenges, applications, and future directions. Digital Communications and Networks, 9 (6), 1265–1290. https://doi.org/10.1016/j.dcan.2023.05.006
- Martin, J. G., Muros, F. J., Maestre, J. M., Camacho, E. F. (2023). Multi-robot task allocation clustering based on game theory. Robotics and Autonomous Systems, 161, 104314. https://doi.org/10.1016/j.robot.2022.104314
- Kanoon, Z. E., Al-Araji, A. S., Abdullah, M. N. (2022). Enhancement of Cell Decomposition Path-Planning Algorithm for Autonomous Mobile Robot Based on an Intelligent Hybrid Optimization Method. International Journal of Intelligent Engineering and Systems, 15 (3), 161–175. Available at: https://inass.org/wp-content/uploads/2022/02/2022063014-2.pdf
- Zhang, H., Peng, Q. (2022). PSO and K-means-based semantic segmentation toward agricultural products. Future Generation Computer Systems, 126, 82–87. https://doi.org/10.1016/j.future.2021.06.059
- Salama, O. A. A., Eltaib, M. E. H., Mohamed, H. A., Salah, O. (2021). RCD: Radial Cell Decomposition Algorithm for Mobile Robot Path Planning. IEEE Access, 9, 149982–149992. https://doi.org/10.1109/access.2021.3125105
- Trung, D., Tuan, N., Bang, N., Tuyen, T. (2021). Synthesis of Line of Sight Angle Coordinate Filter on the Basis of Interactive Multi-Model Evaluation Algorithm. Informatics and Automation, 20 (6), 1333–1367. https://doi.org/10.15622/ia.20.6.6
- Rafai, A. N. A., Adzhar, N., Jaini, N. I. (2022). A Review on Path Planning and Obstacle Avoidance Algorithms for Autonomous Mobile Robots. Journal of Robotics, 2022, 1–14. https://doi.org/10.1155/2022/2538220
- Abdulsaheb, J. A., Kadhim, D. J. (2023). Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey. Robotics, 12 (4), 93. https://doi.org/10.3390/robotics12040093
- Zhu, K., Zhang, T. (2021). Deep reinforcement learning based mobile robot navigation: A review. Tsinghua Science and Technology, 26 (5), 674–691. https://doi.org/10.26599/tst.2021.9010012
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Nguyen Thi Dieu Linh, Dao Xuan Hien, Nguyen Van Bang

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






